 网硕互联帮助中心
网硕互联帮助中心
Arduino是一个开放源码的电子原型平台,它可以让你用简单的硬件和软件来创建各种互动的项目。Arduino的核心是一个微控制器板,它可以通过一系列的引脚来连接各种传感器、执行器、显示器等外部设备。Arduino的编程是基于C/C++语言的,你可以使用Arduino IDE(集成开发环境)来编写、编译和上传代码到Arduino板上。Arduino还有一个丰富的库和社区,你可以利用它们来扩展Arduino的功能和学习Arduino的知识。
Arduino的特点是: 1、开放源码:Arduino的硬件和软件都是开放源码的,你可以自由地修改、复制和分享它们。 2、易用:Arduino的硬件和软件都是为初学者和非专业人士设计的,你可以轻松地上手和使用它们。 3、便宜:Arduino的硬件和软件都是非常经济的,你可以用很低的成本来实现你的想法。 4、多样:Arduino有多种型号和版本,你可以根据你的需要和喜好来选择合适的Arduino板。 5、创新:Arduino可以让你用电子的方式来表达你的创意和想象,你可以用Arduino来制作各种有趣和有用的项目,如机器人、智能家居、艺术装置等。
 Arduino FreeRTOS是一个结合了Arduino平台和FreeRTOS实时操作系统(RTOS)的概念。为了全面详细地解释这个概念,我们可以从以下几个方面进行阐述:
Arduino FreeRTOS是一个结合了Arduino平台和FreeRTOS实时操作系统(RTOS)的概念。为了全面详细地解释这个概念,我们可以从以下几个方面进行阐述:
一、Arduino平台 Arduino是一个开源的硬件和软件平台,旨在简化电子设备的原型设计和开发。它包含了一系列基于易用硬件和软件的微控制器,以及一个用于编写和上传代码的集成开发环境(IDE)。Arduino平台以其简洁的编程接口和丰富的扩展功能,成为了电子爱好者、设计师、工程师和艺术家们的首选工具。
二、FreeRTOS实时操作系统(RTOS) FreeRTOS是一个开源的、轻量级的实时操作系统内核,专为嵌入式设备设计。它提供了任务管理、时间管理、信号量、消息队列、内存管理、软件定时器等一系列功能,以满足较小系统的需求。FreeRTOS以其源码公开、可移植、可裁减和调度策略灵活的特点,受到了广大嵌入式开发者的青睐。
三、Arduino FreeRTOS 1、定义:Arduino FreeRTOS是指在Arduino平台上运行FreeRTOS实时操作系统的解决方案。它允许开发者在Arduino设备上实现多任务并行处理,从而提高程序的灵活性和响应性。
2、功能: 多任务处理:使用FreeRTOS,开发者可以在Arduino上同时运行多个任务,每个任务独立执行不同的操作。这有助于将复杂的项目分解为多个并发执行的部分,从而提高开发效率。 实时性要求高的应用:FreeRTOS能够确保任务按照预定的时间约束执行,满足实时性要求。通过设置任务的优先级和时间片轮转调度策略,开发者可以控制任务的执行顺序和频率。 通信与同步:FreeRTOS提供了多种通信和同步机制,如队列、信号量、互斥锁等。这些机制有助于在不同的任务之间进行数据交换和同步操作,实现任务之间的协作。 低功耗应用:FreeRTOS提供了休眠和唤醒机制,有助于优化功耗。开发者可以将某些任务设置为休眠状态,在需要时唤醒它们来执行操作,从而减少功耗。
3、优势: 提高程序的复杂性和功能:通过多任务并行处理,Arduino FreeRTOS允许开发者实现更复杂的软件架构和更高效的代码执行。 增强实时性:FreeRTOS确保了任务的实时响应,这对于需要精确时间控制的应用至关重要。 简化编程:将复杂的逻辑分解为多个任务,使得代码更易于理解和维护。 移植性:FreeRTOS支持多种微控制器平台,使得基于FreeRTOS的项目在不同硬件间的移植变得更加容易。
4、注意事项: 虽然FreeRTOS带来了多任务的优势,但也会增加编程难度和调试工作。因此,在选择是否使用FreeRTOS时,开发者需要权衡利弊。 在使用FreeRTOS时,开发者需要注意任务堆栈大小、优先级设置等参数,以确保系统的稳定性和可靠性。 综上所述,Arduino FreeRTOS是一个结合了Arduino平台和FreeRTOS实时操作系统的强大解决方案。它允许开发者在Arduino设备上实现多任务并行处理,提高程序的复杂性和功能,同时保持代码的可读性和可靠性。
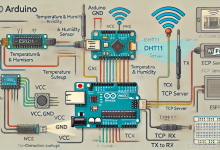
 主要特点 基于 UDP 协议 无连接性:UDP 是一种无连接的传输层协议,与 TCP 相比,UDP 服务器不需要在发送数据之前建立连接,也不需要在数据传输完成后拆除连接。这使得 UDP 服务器能够快速地发送和接收数据,提高了数据传输的效率,尤其适用于对实时性要求较高的场景。 轻量级:UDP 协议相对简单,头部开销小,数据传输效率高。在 Arduino 这种资源有限的平台上,UDP 服务器可以在较少的资源消耗下实现数据的传输,能够更好地适应硬件资源的限制。 状态管理功能 多状态支持:可以定义和管理多种服务器状态,如初始化状态、监听状态、数据处理状态、错误状态等。通过对不同状态的管理,服务器能够更灵活地应对各种情况,例如在初始化状态下完成资源的初始化和配置,在监听状态下等待客户端的请求,在数据处理状态下对接收到的数据进行处理等。 状态转换控制:能够根据不同的事件和条件进行状态转换。例如,当服务器接收到客户端的连接请求时,可能会从监听状态转换到数据处理状态;当出现错误时,可能会转换到错误状态并进行相应的错误处理。这种状态转换机制使得服务器的行为更加可控和可预测,提高了服务器的稳定性和可靠性。 RTOS 集成 任务调度支持:在 Arduino RTOS 环境下,UDP 服务器可以作为一个独立的任务运行,并且能够与其他任务共享系统资源。RTOS 的任务调度机制可以确保 UDP 服务器任务在合适的时间得到执行,同时也可以保证其他任务的正常运行,实现多任务的并发执行,提高系统的整体性能。 实时性保障:利用 RTOS 的实时性特点,UDP 服务器能够及时响应网络事件和数据请求。对于实时性要求较高的应用场景,如工业自动化控制、实时数据采集等,UDP 服务器可以在规定的时间内完成数据的发送和接收,满足系统对实时性的要求。
主要特点 基于 UDP 协议 无连接性:UDP 是一种无连接的传输层协议,与 TCP 相比,UDP 服务器不需要在发送数据之前建立连接,也不需要在数据传输完成后拆除连接。这使得 UDP 服务器能够快速地发送和接收数据,提高了数据传输的效率,尤其适用于对实时性要求较高的场景。 轻量级:UDP 协议相对简单,头部开销小,数据传输效率高。在 Arduino 这种资源有限的平台上,UDP 服务器可以在较少的资源消耗下实现数据的传输,能够更好地适应硬件资源的限制。 状态管理功能 多状态支持:可以定义和管理多种服务器状态,如初始化状态、监听状态、数据处理状态、错误状态等。通过对不同状态的管理,服务器能够更灵活地应对各种情况,例如在初始化状态下完成资源的初始化和配置,在监听状态下等待客户端的请求,在数据处理状态下对接收到的数据进行处理等。 状态转换控制:能够根据不同的事件和条件进行状态转换。例如,当服务器接收到客户端的连接请求时,可能会从监听状态转换到数据处理状态;当出现错误时,可能会转换到错误状态并进行相应的错误处理。这种状态转换机制使得服务器的行为更加可控和可预测,提高了服务器的稳定性和可靠性。 RTOS 集成 任务调度支持:在 Arduino RTOS 环境下,UDP 服务器可以作为一个独立的任务运行,并且能够与其他任务共享系统资源。RTOS 的任务调度机制可以确保 UDP 服务器任务在合适的时间得到执行,同时也可以保证其他任务的正常运行,实现多任务的并发执行,提高系统的整体性能。 实时性保障:利用 RTOS 的实时性特点,UDP 服务器能够及时响应网络事件和数据请求。对于实时性要求较高的应用场景,如工业自动化控制、实时数据采集等,UDP 服务器可以在规定的时间内完成数据的发送和接收,满足系统对实时性的要求。
应用场景 物联网数据采集与监控 传感器数据上传:在物联网应用中,大量的传感器节点需要将采集到的数据上传到服务器。UDP 服务器可以作为数据接收端,接收来自各个传感器节点发送的传感器数据。通过状态管理,可以确保服务器在不同的工作阶段(如初始化、数据采集、故障处理等)能够正确地处理数据,保证数据的稳定性和可靠性。 设备状态监控:可以实时监控物联网设备的状态信息,如设备的运行状态、电量信息、连接状态等。当设备状态发生变化时,通过 UDP 协议将状态信息发送到服务器,服务器根据接收到的信息进行相应的处理和分析,实现对物联网设备的远程监控和管理。 工业自动化控制系统 实时数据传输:在工业自动化生产线上,需要实时传输各种生产数据和控制指令。UDP 服务器可以作为数据传输的核心,接收来自生产设备的实时数据,如生产进度、设备运行参数等,并将控制指令发送到相应的设备。状态管理功能可以确保服务器在不同的生产阶段(如开机、生产、停机等)能够准确地进行数据传输和指令控制,保证生产过程的顺利进行。 分布式系统协调:在分布式工业控制系统中,UDP 服务器可以用于协调各个子系统之间的工作。通过状态管理,服务器可以根据整个系统的运行状态,向不同的子系统发送相应的协调指令,实现各个子系统之间的协同工作,提高整个工业自动化系统的效率和可靠性。 实时游戏通信 游戏数据传输:在实时在线游戏中,UDP 服务器常用于传输游戏中的实时数据,如玩家的位置信息、游戏状态更新、操作指令等。由于 UDP 的无连接性和低延迟特点,能够快速地将游戏数据传输到各个玩家的客户端,保证游戏的流畅性和实时性。状态管理功能可以确保服务器在不同的游戏阶段(如游戏初始化、游戏进行、游戏结束等)能够正确地处理和传输游戏数据,提供良好的游戏体验。 多人游戏同步:对于多人在线游戏,UDP 服务器可以用于实现玩家之间的游戏状态同步。通过状态管理,服务器可以根据各个玩家的操作和游戏事件,及时更新游戏的全局状态,并将更新后的状态发送给所有玩家,保证每个玩家看到的游戏画面和状态是一致的,实现多人游戏的同步运行。
需要注意的事项 UDP 协议特性相关 数据可靠性:UDP 是一种不可靠的传输协议,数据在传输过程中可能会出现丢失、乱序等情况。在设计 UDP 服务器时,需要考虑数据的可靠性问题,采取相应的措施来保证数据的完整性和准确性。例如,可以在应用层添加校验和、序列号等机制,对接收的数据进行校验和排序,发现数据丢失或错误时进行重传或纠错处理。 流量控制:UDP 协议没有内置的流量控制机制,发送方可以无限制地发送数据。如果接收方的处理速度跟不上发送方的发送速度,可能会导致数据缓冲区溢出,造成数据丢失。因此,需要在服务器端和客户端进行合理的流量控制,例如限制发送方的发送速率,或者在接收方设置合适的缓冲区大小,并根据缓冲区的使用情况通知发送方调整发送速度。 状态管理相关 状态定义与转换逻辑:状态的定义和转换逻辑需要经过仔细的设计和测试,确保服务器在各种情况下都能正确地进行状态转换和处理。状态之间的转换条件应该明确、合理,避免出现状态混乱或死循环等问题。同时,要考虑到各种异常情况和边界条件,如网络中断、数据错误等,确保服务器能够在这些情况下正确地切换到合适的状态并进行处理。 状态数据存储与维护:服务器在不同状态下可能需要存储和维护一些相关的数据,如连接信息、数据缓存、配置参数等。需要合理地设计状态数据的存储结构和管理方式,确保数据的安全性和一致性。在状态转换过程中,要注意对状态数据的正确更新和清理,避免出现数据残留或错误。 Arduino RTOS 环境相关 资源分配:Arduino 平台的资源有限,在运行 UDP 服务器时需要合理分配资源,包括内存、CPU 时间等。要避免 UDP 服务器任务占用过多的资源,导致其他任务无法正常运行。可以通过优化代码、合理设置任务优先级和堆栈大小等方式,提高资源的利用效率,确保系统的稳定性。 中断处理:在处理网络数据接收和发送时,可能会涉及到中断操作。要注意中断处理函数的编写,避免中断处理时间过长,影响系统的实时性和其他任务的执行。可以采用合适的中断处理策略,如将一些耗时的操作放到任务中处理,减少中断处理函数的执行时间。
 1、基础UDP服务器
1、基础UDP服务器
#include <Arduino.h>
#include <WiFi.h>
#include <WiFiUdp.h>
#include <FreeRTOS.h>
const char* ssid = "your_SSID";
const char* password = "your_PASSWORD";
const int udpPort = 12345;
WiFiUDP udp;
char incomingPacket[255];
char replyPacket[] = "状态信息:在线";
void setup() {
Serial.begin(115200);
WiFi.begin(ssid, password);
while (WiFi.status() != WL_CONNECTED) {
delay(1000);
Serial.println("连接中…");
}
Serial.println("连接成功");
udp.begin(udpPort);
Serial.printf("UDP服务器已启动,端口: %d\\n", udpPort);
}
void loop() {
int packetSize = udp.parsePacket();
if (packetSize) {
int len = udp.read(incomingPacket, 255);
incomingPacket[len] = 0; // 确保字符串结束
Serial.printf("接收到数据: %s\\n", incomingPacket);
// 回复客户端
udp.beginPacket(udp.remoteIP(), udp.remotePort());
udp.write(replyPacket);
udp.endPacket();
}
}
2、状态管理的UDP服务器
#include <Arduino.h>
#include <WiFi.h>
#include <WiFiUdp.h>
#include <FreeRTOS.h>
const char* ssid = "your_SSID";
const char* password = "your_PASSWORD";
const int udpPort = 12345;
WiFiUDP udp;
char incomingPacket[255];
char replyPacket[255];
int deviceState = 0; // 设备状态,0表示关闭,1表示开启
void setup() {
Serial.begin(115200);
WiFi.begin(ssid, password);
while (WiFi.status() != WL_CONNECTED) {
delay(1000);
Serial.println("连接中…");
}
Serial.println("连接成功");
udp.begin(udpPort);
Serial.printf("UDP服务器已启动,端口: %d\\n", udpPort);
}
void loop() {
int packetSize = udp.parsePacket();
if (packetSize) {
int len = udp.read(incomingPacket, 255);
incomingPacket[len] = 0;
Serial.printf("接收到数据: %s\\n", incomingPacket);
// 更新设备状态
if (strcmp(incomingPacket, "状态查询") == 0) {
snprintf(replyPacket, sizeof(replyPacket), "设备状态: %d", deviceState);
} else if (strcmp(incomingPacket, "开启") == 0) {
deviceState = 1;
snprintf(replyPacket, sizeof(replyPacket), "设备已开启");
} else if (strcmp(incomingPacket, "关闭") == 0) {
deviceState = 0;
snprintf(replyPacket, sizeof(replyPacket), "设备已关闭");
} else {
snprintf(replyPacket, sizeof(replyPacket), "未知命令");
}
// 回复客户端
udp.beginPacket(udp.remoteIP(), udp.remotePort());
udp.write(replyPacket);
udp.endPacket();
}
}
3、多线程状态管理的UDP服务器
#include <Arduino.h>
#include <WiFi.h>
#include <WiFiUdp.h>
#include <FreeRTOS.h>
const char* ssid = "your_SSID";
const char* password = "your_PASSWORD";
const int udpPort = 12345;
WiFiUDP udp;
char incomingPacket[255];
char replyPacket[255];
int deviceState = 0; // 设备状态,0表示关闭,1表示开启
void handleCommand(const char* command) {
if (strcmp(command, "状态查询") == 0) {
snprintf(replyPacket, sizeof(replyPacket), "设备状态: %d", deviceState);
} else if (strcmp(command, "开启") == 0) {
deviceState = 1;
snprintf(replyPacket, sizeof(replyPacket), "设备已开启");
} else if (strcmp(command, "关闭") == 0) {
deviceState = 0;
snprintf(replyPacket, sizeof(replyPacket), "设备已关闭");
} else {
snprintf(replyPacket, sizeof(replyPacket), "未知命令");
}
}
void udpTask(void* pvParameters) {
udp.begin(udpPort);
Serial.printf("UDP服务器已启动,端口: %d\\n", udpPort);
while (1) {
int packetSize = udp.parsePacket();
if (packetSize) {
int len = udp.read(incomingPacket, 255);
incomingPacket[len] = 0;
Serial.printf("接收到数据: %s\\n", incomingPacket);
handleCommand(incomingPacket);
// 回复客户端
udp.beginPacket(udp.remoteIP(), udp.remotePort());
udp.write(replyPacket);
udp.endPacket();
}
vTaskDelay(pdMS_TO_TICKS(100)); // 限制循环频率
}
}
void setup() {
Serial.begin(115200);
WiFi.begin(ssid, password);
while (WiFi.status() != WL_CONNECTED) {
delay(1000);
Serial.println("连接中…");
}
Serial.println("连接成功");
xTaskCreate(udpTask, "UDP任务", 1000, NULL, 1, NULL);
}
void loop() {
// 主循环留空
}
要点解读 状态管理实现: 所有案例中实现了一个简单的状态管理系统,通过UDP接收命令并改变设备状态(开启或关闭)。状态管理的设计使得设备能够根据收到的指令进行响应。 UDP通信基础: 使用WiFiUDP类实现UDP通信,能够快速、无连接地发送和接收数据。UDP协议适合于实时性要求高但对数据完整性要求不高的应用场景。 动态命令处理: 在案例2和案例3中,通过解析接收到的命令(如“状态查询”、“开启”、“关闭”),动态改变设备状态并回复客户端。这样的设计使得设备可以灵活应对不同的指令。 多线程设计: 案例3中使用FreeRTOS创建了一个UDP任务,允许设备在接收和处理UDP数据的同时继续执行其他任务。通过任务管理,系统的响应能力和处理效率得到了提升。 串口监控与调试: 使用Serial.begin()和Serial.print()输出调试信息,便于监控UDP服务器的状态和接收到的数据。这对于开发和调试非常有帮助,可以实时观察设备运行情况。
4、基础UDP服务器实现
#include <Arduino.h>
#include <FreeRTOS.h>
#include <WiFi.h>
#include <WiFiUdp.h>
const char* ssid = "YOUR_SSID"; // Wi-Fi SSID
const char* password = "YOUR_PASSWORD"; // Wi-Fi密码
WiFiUDP udp; // UDP对象
char incomingPacket[255]; // 接收数据包缓冲区
void setup() {
Serial.begin(115200);
WiFi.begin(ssid, password);
while (WiFi.status() != WL_CONNECTED) {
delay(1000);
Serial.println("连接中…");
}
Serial.println("连接成功!");
udp.begin(12345); // 在端口12345上开始UDP服务器
Serial.println("UDP服务器已启动!");
}
void loop() {
int packetSize = udp.parsePacket();
if (packetSize) {
int len = udp.read(incomingPacket, 255);
if (len > 0) {
incomingPacket[len] = 0; // 确保字符串结束
}
Serial.printf("接收到数据: %s\\n", incomingPacket);
udp.beginPacket(udp.remoteIP(), udp.remotePort());
udp.write("ACK"); // 发送确认响应
udp.endPacket();
}
vTaskDelay(pdMS_TO_TICKS(100)); // 防止占用过多CPU
}
要点解读: 基础UDP服务器:通过WiFi和UDP库创建一个基本的UDP服务器,展示了如何在Arduino上实现网络通信。 状态管理:通过WiFi连接状态和UDP数据包接收状态管理服务器的运行状态,便于后续扩展。 串口输出:使用串口监控接收到的数据,方便调试和状态检查。 简单应答机制:服务器在接收到数据后回复确认信息(ACK),提供了基本的网络交互。 CPU时间管理:使用vTaskDelay避免阻塞,确保程序在RTOS环境中良好运行。
5、带状态管理的UDP服务器
#include <Arduino.h>
#include <FreeRTOS.h>
#include <WiFi.h>
#include <WiFiUdp.h>
const char* ssid = "YOUR_SSID";
const char* password = "YOUR_PASSWORD";
WiFiUDP udp;
char incomingPacket[255];
bool serverActive = true; // 服务器状态管理
void setup() {
Serial.begin(115200);
WiFi.begin(ssid, password);
while (WiFi.status() != WL_CONNECTED) {
delay(1000);
Serial.println("连接中…");
}
Serial.println("连接成功!");
udp.begin(12345);
Serial.println("UDP服务器已启动!");
}
void loop() {
if (serverActive) {
int packetSize = udp.parsePacket();
if (packetSize) {
int len = udp.read(incomingPacket, 255);
if (len > 0) {
incomingPacket[len] = 0;
}
Serial.printf("接收到数据: %s\\n", incomingPacket);
udp.beginPacket(udp.remoteIP(), udp.remotePort());
udp.write("ACK");
udp.endPacket();
}
} else {
Serial.println("服务器已停用.");
}
vTaskDelay(pdMS_TO_TICKS(100));
}
// 停用服务器的任务
void disableServerTask(void* pvParameters) {
while (1) {
if (Serial.available()) {
char command = Serial.read();
if (command == 'd') { // 输入'd'停用服务器
serverActive = false;
Serial.println("服务器已停用.");
} else if (command == 'e') { // 输入'e'启用服务器
serverActive = true;
Serial.println("服务器已启用.");
}
}
vTaskDelay(pdMS_TO_TICKS(100));
}
}
void startDisableServerTask() {
xTaskCreate(disableServerTask, "DisableServer", 1000, NULL, 1, NULL);
}
要点解读: 状态管理:通过serverActive变量控制UDP服务器的启用和停用状态,增强了对服务器的管理能力。 命令控制:通过串口输入命令('d’停用,'e’启用)动态控制服务器状态,提供了更灵活的操作方式。 任务分离:将服务器状态管理放在独立任务中,提高了代码的模块化和可维护性。 串口输出:实时反馈服务器状态变化,便于用户监控和调试。 RTOS任务管理:使用RTOS的任务管理功能,展示了多任务环境下的状态管理方法。
6、带状态记录的UDP服务器
#include <Arduino.h>
#include <FreeRTOS.h>
#include <WiFi.h>
#include <WiFiUdp.h>
const char* ssid = "YOUR_SSID";
const char* password = "YOUR_PASSWORD";
WiFiUDP udp;
char incomingPacket[255];
volatile bool serverActive = true; // 服务器状态
int messageCount = 0; // 消息计数
void setup() {
Serial.begin(115200);
WiFi.begin(ssid, password);
while (WiFi.status() != WL_CONNECTED) {
delay(1000);
Serial.println("连接中…");
}
Serial.println("连接成功!");
udp.begin(12345);
Serial.println("UDP服务器已启动!");
}
void loop() {
if (serverActive) {
int packetSize = udp.parsePacket();
if (packetSize) {
int len = udp.read(incomingPacket, 255);
if (len > 0) {
incomingPacket[len] = 0;
}
messageCount++;
Serial.printf("接收到数据: %s (消息计数: %d)\\n", incomingPacket, messageCount);
udp.beginPacket(udp.remoteIP(), udp.remotePort());
udp.write("ACK");
udp.endPacket();
}
} else {
Serial.println("服务器已停用.");
}
vTaskDelay(pdMS_TO_TICKS(100));
}
// 停用服务器的任务
void disableServerTask(void* pvParameters) {
while (1) {
if (Serial.available()) {
char command = Serial.read();
if (command == 'd') {
serverActive = false;
Serial.println("服务器已停用.");
} else if (command == 'e') {
serverActive = true;
Serial.println("服务器已启用.");
}
}
vTaskDelay(pdMS_TO_TICKS(100));
}
}
void startDisableServerTask() {
xTaskCreate(disableServerTask, "DisableServer", 1000, NULL, 1, NULL);
}
要点解读: 状态记录:增加messageCount变量记录接收到的消息数量,提供了更丰富的状态信息。 更复杂的状态管理:结合服务器启用状态和消息计数,实现了更复杂的状态管理功能,适合实际应用需求。 实时反馈:串口输出接收到的数据和消息计数,帮助用户监控UDP服务器的运行状态。 任务分离:使用独立任务来控制服务器的启用和停用,展示了RTOS任务调度的灵活性。 扩展性强:可以进一步增加更多功能,如状态持久化、网络错误处理等,适合复杂的应用场景。
注意,以上案例只是为了拓展思路,仅供参考。它们可能有错误、不适用或者无法编译。您的硬件平台、使用场景和Arduino版本可能影响使用方法的选择。实际编程时,您要根据自己的硬件配置、使用场景和具体需求进行调整,并多次实际测试。您还要正确连接硬件,了解所用传感器和设备的规范和特性。涉及硬件操作的代码,您要在使用前确认引脚和电平等参数的正确性和安全性。







评论前必须登录!
注册