 网硕互联帮助中心
网硕互联帮助中心ROS 基础教学系列-ROS参数服务器(Param)
文章目录
- ROS 基础教学系列-ROS参数服务器(Param)
- 前言
- 一、参数服务器通讯模型
- 二、Param Hello World
-
- 2.1 创建并初始化功能包
- 2.2 操作参数(C++版)
- 2.3 其他操作参数的函数
- 2.4 操作参数(Python版)
前言
参数服务器在ROS中主要用于实现不同节点之间的数据共享。
参数服务器相当于是独立于所有节点的一个公共容器,可以将数据存储在该容器中,被不同的节点调用,当然不同的节点也可以往其中存储数据。
使用场景一般存储一些机器人的固有参数,如产品定义、全局配置等。
主要思想就是一个共享数据域,供不同节点使用。
一、参数服务器通讯模型
参数服务器模型涉及到三个角色:
- Master (管理者)
- Setter(设置者)
- User(使用者)
Master 负责管理参数与 Setter/User 的操作,Setter 可以向 Master 设置参数,User 可以从 Master 获取参数。
这里只是方便说明,实际上通讯方操作参数前不会向 ROS Master 注册身份信息,所以对 ROS Master 而言,没有 Setter 与 User 之分,每个访问参数服务器的通讯方都是使用者。

通讯流程:
1)Setter设置参数 Setter 通过 RPC 向参数服务器设置参数(包括参数名与参数值),ROS Master 将参数保存到参数列表中。
2)User获取参数 User 通过 RPC 向参数服务器发送参数查找请求,请求中包含要查找的参数名。
3)ROS Master返回参数信息 ROS Master 根据请求提供的参数名查找参数值,并将查询结果通过 RPC 发送给 User。
参数服务器使用 XMLRPC 数据格式存储参数,支持的数据类型如下:
- 32-bit integers
- booleans
- strings
- doubles
- iso8601 dates
- lists
- base64-encoded binary data
二、Param Hello World
代码学习开始于 Hello World,同样,使用Hello World介绍参数服务器的简单使用。
使用参数服务器,通讯方操作参数前没有向 ROS Master 注册身份信息,直接对参数进行操作。
接下来实现一个简单的参数操作,设置不同数据类型的参数,如机器人的 名字(name)、长(length)、宽(width)、高(height) 等,并对其进行读取删除等操作。
2.1 创建并初始化功能包
(这一步不是必须,这里只是为了方便清晰的说明,也可以使用已有的包,在包里新增节点等方法)
首先创建 param_hello_world 包,命令如下:
catkin_create_pkg param_hello_world roscpp rospy
创建后,文件结构如下: 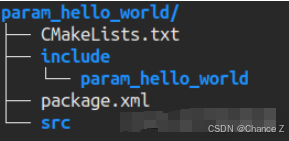
2.2 操作参数(C++版)
ROS 为 C++ 提供了两套 API,如下:
通过 ros::NodeHandle 对象调用 通过 ros::param 名空间调用 示例如下:
在创建的 param_hello_world 包路径下有一个 src 目录,在这里存储C++源码,我们创建 param_hello_world_set.cpp 和 param_hello_world_get.cpp ,修改 CMakeLists.txt ,添加如下内容:
add_executable(${PROJECT_NAME}_set src/param_hello_world_set.cpp)
add_executable(${PROJECT_NAME}_get src/param_hello_world_get.cpp)
target_link_libraries(${PROJECT_NAME}_set
${catkin_LIBRARIES}
)
target_link_libraries(${PROJECT_NAME}_get
${catkin_LIBRARIES}
)
编辑 param_hello_world_set.cpp 内容如下:
#include <ros/ros.h>
int main(int argc, char **argv)
{
setlocale(LC_ALL, "");
ros::init(argc, argv, "param_hello_world_set");
ros::NodeHandle nh;
std::cout << std::endl
<< "********** ros::NodeHandle **********" << std::endl;
{
std::string name = "vbot";
std::string geometry = "rectangle";
double wheel_radius = 0.1;
int wheel_num = 4;
bool vision = true;
std::vector<double> base_size = {0.7, 0.6, 0.3};
std::map<std::string, int> sensor_id = {{"camera", 0}, {"laser", 2}};
// 设置参数
std::cout << "– 设置参数 –" << std::endl;
nh.setParam("name", "vbot"); // 字符串, char*
nh.setParam("geometry", geometry); // 字符串, string
nh.setParam("wheel_radius", wheel_radius); // double
nh.setParam("wheel_num", wheel_num); // int
nh.setParam("vision", vision); // bool
nh.setParam("base_size", base_size); // vector
nh.setParam("sensor_id", sensor_id); // map
// 验证是否设置成功
system("rosparam get name");
system("rosparam get geometry");
system("rosparam get wheel_radius");
system("rosparam get wheel_num");
system("rosparam get vision");
system("rosparam get base_size");
system("rosparam get sensor_id");
}
std::cout << std::endl
<< "********** ros::param **********" << std::endl;
{
std::string name = "vbot";
std::string geometry = "rectangle";
double wheel_radius = 0.1;
int wheel_num = 4;
bool vision = true;
std::vector<double> base_size = {0.7, 0.6, 0.3};
std::map<std::string, int> sensor_id = {{"camera", 0}, {"laser", 2}};
// 设置参数
std::cout << "– 设置参数 –" << std::endl;
ros::param::set("name_p", "vbot"); // 字符串, char*
ros::param::set("geometry_p", geometry); // 字符串, string
ros::param::set("wheel_radius_p", wheel_radius); // double
ros::param::set("wheel_num_p", wheel_num); // int
ros::param::set("vision_p", vision); // bool
ros::param::set("base_size_p", base_size); // vector
ros::param::set("sensor_id_p", sensor_id); // map
// 验证是否设置成功
system("rosparam get name_p");
system("rosparam get geometry_p");
system("rosparam get wheel_radius_p");
system("rosparam get wheel_num_p");
system("rosparam get vision_p");
system("rosparam get base_size_p");
system("rosparam get sensor_id_p");
}
return 0;
}
编译运行,结果如下: 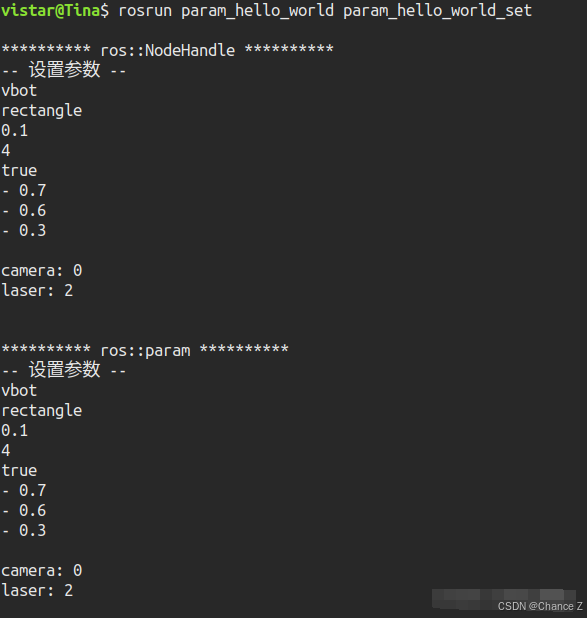 编辑 param_hello_world_get.cpp 内容如下:
编辑 param_hello_world_get.cpp 内容如下:
#include <ros/ros.h>
int main(int argc, char **argv)
{
setlocale(LC_ALL, "");
ros::init(argc, argv, "param_hello_world_get");
ros::NodeHandle nh;
std::cout << std::endl
<< "********** ros::NodeHandle **********" << std::endl;
{
// 修改参数
std::cout << std::endl
<< "– 修改参数 –" << std::endl;
nh.setParam("name", "mybot"); // 字符串, char*
nh.setParam("geometry", "circular"); // 字符串, char*
nh.setParam("wheel_radius", 0.15); // double
nh.setParam("wheel_num", 2); // int
nh.setParam("vision", false); // bool
std::vector<double> base_size = {0.2, 0.04};
nh.setParam("base_size", base_size); // vector
std::map<std::string, int> sensor_id = {{"camera", 0}, {"laser", 2}};
sensor_id.insert({"ultrasonic", 5});
ros::param::set("sensor_id", sensor_id); // map
// 获取参数
std::cout << std::endl
<< "– 获取参数 –" << std::endl;
std::string name;
std::string geometry;
double wheel_radius;
int wheel_num;
bool vision;
nh.getParam("name", name);
nh.getParam("geometry", geometry);
nh.getParam("wheel_radius", wheel_radius);
nh.getParam("wheel_num", wheel_num);
nh.getParam("vision", vision);
nh.getParam("base_size", base_size);
nh.getParam("sensor_id", sensor_id);
ROS_INFO("ros::NodeHandle getParam, name: %s, geometry: %s, wheel_radius: %lf, wheel: %d, vision: %s, base_size: (%lf, %lf)",
name.c_str(), geometry.c_str(), wheel_radius, wheel_num, vision ? "true" : "false",
base_size[0], base_size[1]);
for (auto sensor : sensor_id)
{
ROS_INFO("ros::NodeHandle getParam, %s_id: %d", sensor.first.c_str(), sensor.second);
}
// 删除参数
std::cout << std::endl
<< "– 删除参数 –" << std::endl;
nh.deleteParam("vision");
system("rosparam get vision");
// 其他操作函数
std::cout << std::endl
<< "– 其他操作函数 –" << std::endl;
double wheel_radius1;
wheel_radius1 = nh.param("wheel_radius", wheel_radius1);
ROS_INFO("param, wheel_radius: %lf", wheel_radius1);
nh.getParamCached("wheel_radius", wheel_radius1);
std::vector<std::string> keys_v;
nh.getParamNames(keys_v);
for (auto key : keys_v)
{
ROS_INFO("getParamNames, key: %s", key.c_str());
}
if (nh.hasParam("vision"))
{
ROS_INFO("hasParam, 存在该参数");
}
else
{
ROS_INFO("hasParam, 不存在该参数");
}
std::string result;
nh.searchParam("name", result);
ROS_INFO("searchParam, result: %s", result.c_str());
}
std::cout << std::endl
<< "********** ros::param **********" << std::endl;
{
// 修改参数
std::cout << std::endl
<< "– 修改参数 –" << std::endl;
ros::param::set("name_p", "mybot"); // 字符串, char*
ros::param::set("geometry_p", "circular"); // 字符串, char*
ros::param::set("wheel_radius_p", 0.15); // double
ros::param::set("wheel_num_p", 2); // int
ros::param::set("vision_p", false); // bool
std::vector<double> base_size = {0.2, 0.04};
ros::param::set("base_size_p", base_size); // vector
std::map<std::string, int> sensor_id = {{"camera", 0}, {"laser", 2}};
sensor_id.insert({"ultrasonic", 5});
ros::param::set("sensor_id_p", sensor_id); // map
// 获取参数
std::cout << std::endl
<< "– 获取参数 –" << std::endl;
std::string name;
std::string geometry;
double wheel_radius;
int wheel_num;
bool vision;
ros::param::get("name_p", name);
ros::param::get("geometry_p", geometry);
ros::param::get("wheel_radius_p", wheel_radius);
ros::param::get("wheel_num_p", wheel_num);
ros::param::get("vision_p", vision);
ros::param::get("base_size_p", base_size);
ros::param::get("sensor_id_p", sensor_id);
ROS_INFO("ros::param get, name: %s, geometry: %s, wheel_radius: %lf, wheel: %d, vision: %s, base_size: (%lf, %lf)",
name.c_str(), geometry.c_str(), wheel_radius, wheel_num, vision ? "true" : "false",
base_size[0], base_size[1]);
for (auto sensor : sensor_id)
{
ROS_INFO("ros::param getParam, %s_id: %d", sensor.first.c_str(), sensor.second);
}
// 删除参数
std::cout << std::endl
<< "– 删除参数 –" << std::endl;
ros::param::del("vision_p");
system("rosparam get vision_p");
// 其他操作函数
std::cout << std::endl
<< "– 其他操作函数 –" << std::endl;
double wheel_radius1;
wheel_radius1 = ros::param::param("wheel_radius", wheel_radius1);
ROS_INFO("param, wheel_radius: %lf", wheel_radius1);
ros::param::getCached("wheel_radius", wheel_radius1);
std::vector<std::string> keys_v;
ros::param::getParamNames(keys_v);
for (auto key : keys_v)
{
ROS_INFO("getParamNames, key: %s", key.c_str());
}
if (ros::param::has("vision"))
{
ROS_INFO("has, 存在该参数");
}
else
{
ROS_INFO("has, 不存在该参数");
}
std::string result;
ros::param::search("name", result);
ROS_INFO("search, result: %s", result.c_str());
}
return 0;
}
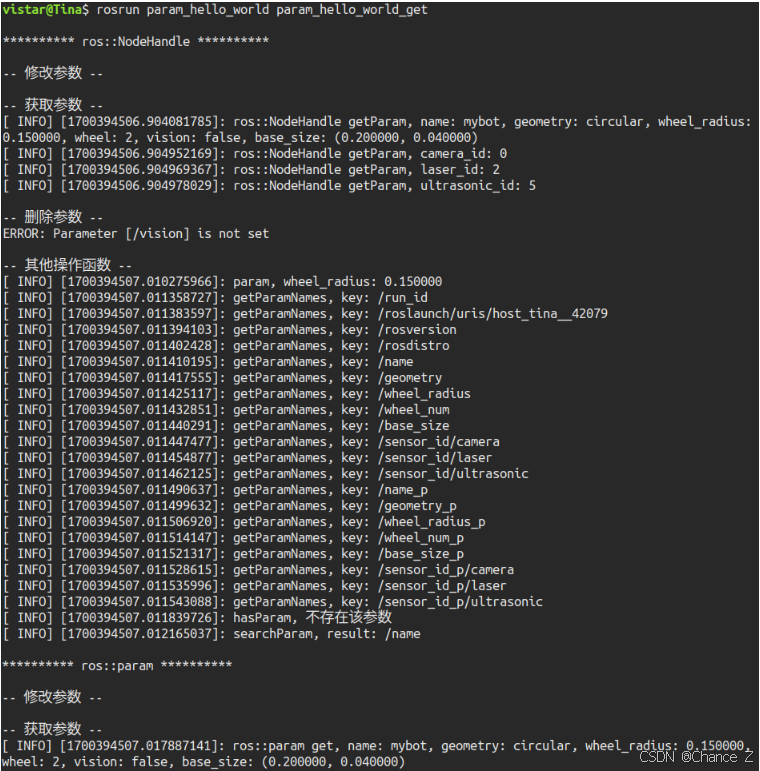
编译运行,结果如下:
2.3 其他操作参数的函数
除了上文提到的setParam()、getParam()、deleteParam() 函数,还有一些其他的参数操作函数,如下:
这里只以通过 ros::NodeHandle 对象调用为例,通过 ros::param 名空间调用类似,只多了一个 unsubscribeCachedParam函数,后面说明
1.param 获取 param_name 的值,如果 param_name 不存在,则返回 default_val
原型: T param(const std::string& param_name, const T& default_val) const
double wheel_radius2;
wheel_radius2 = nh.param("wheel_radius", wheel_radius2);
ROS_INFO("param, wheel_radius: %lf", wheel_radius2);
2.getParamCached() 与getParam()使用方法一样。
首次调用会判断该参数是否获取过,如果获取过则从缓存读取,并向 Master 订阅该参数的变化,不再像getParam()一样通过 RPC 向 Master获取,以提高效率。
示例参考 getParam()。
3.getParamNames() 获取所有设置到 Master 的参数的键,并通过 vector 返回。
原型:bool getParamNames(std::vectorstd::string& keys) const;
std::vector<std::string> keys_v;
nh.getParamNames(keys_v);
for (auto key : keys_v)
{
ROS_INFO("getParamNames, key: %s", key.c_str());
}
4.hasParam() 判断是否存在该参数
原型:bool hasParam(const std::string& key) const;
if (nh.hasParam("vision"))
{
ROS_INFO("存在该参数");
}
else
{
ROS_INFO("不存在该参数");
}
5.searchParam()
搜索给定参数名,如果存在,返回键名,不存在返回空字符串。
原型:bool searchParam(const std::string& key, std::string& result) const;
std::string result;
nh.searchParam("name", result);
ROS_INFO("searchParam, result: %s", result.c_str());
2.4 操作参数(Python版)
与 C++ 不同,ROS 只为 Python 提供了一套操作参数的 API。
在创建的 param_hello_world 包路径下 src 目录的同级,创建一个 scripts 目录,在这里存储脚本(如python脚本),修改 CMakeLists.txt ,添加如下内容:
catkin_install_python(PROGRAMS
scripts/param_hello_world_set.py
scripts/param_hello_world_get.py
DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)
在 scripts 中创建 param_hello_world_set.py 编辑内容如下:
import rospy
import os
if __name__ == "__main__":
rospy.init_node("param_hello_world_set")
# 设置参数
rospy.set_param("name", "vbot") # 字符串, string
rospy.set_param("geometry", "rectangle") # 字符串, string
rospy.set_param("wheel_radius", 0.1) # double
rospy.set_param("wheel_num", 4) # int
rospy.set_param("vision", True) # bool
rospy.set_param("base_size", [0.7, 0.6, 0.3]) # list
rospy.set_param("sensor_id", {"camera": 0, "laser": 2}) # dictionary
# 验证是否设置成功
os.system("rosparam get name")
os.system("rosparam get geometry")
os.system("rosparam get wheel_radius")
os.system("rosparam get wheel_num")
os.system("rosparam get vision")
os.system("rosparam get base_size")
os.system("rosparam get sensor_id")
在 scripts 中创建 param_hello_world_get.py 编辑内容如下:
import rospy
if __name__ == "__main__":
rospy.init_node("param_hello_world_get")
# 修改参数
rospy.set_param("name", "mybot") # 字符串, string
rospy.set_param("geometry", "circular") # 字符串, string
rospy.set_param("wheel_radius", 0.15) # double
rospy.set_param("wheel_num", 2) # int
rospy.set_param("vision", False) # bool
rospy.set_param("base_size", [0.2, 0.04]) # list
rospy.set_param("sensor_id", {"camera": 0, "laser": 2, "ultrasonic": 5}) # dictionary
# 获取参数
name = rospy.get_param("name") # 字符串, string
geometry = rospy.get_param("geometry") # 字符串, string
wheel_radius = rospy.get_param("wheel_radius") # double
wheel_num = rospy.get_param("wheel_num") # int
vision = rospy.get_param("vision") # bool
base_size = rospy.get_param("base_size") # list
sensor_id = rospy.get_param("sensor_id") # dictionary
rospy.loginfo("get_param, name: {}, geometry: {}, wheel_radius: {}, wheel: {}, vision: {}, base_size: ({}, {})"
.format(name, geometry, wheel_radius, wheel_num, vision, base_size[0], base_size[1]))
for key, value in sensor_id.items():
rospy.loginfo("get_param, sensor: {}, id: {}".format(key, value))
# 删除参数
rospy.delete_param("vision")
# 其他操作
wheel_radius1 = rospy.get_param_cached("wheel_radius")
keys = rospy.get_param_names()
for key in keys:
rospy.loginfo("get_param_names, key: {}".format(key))
if rospy.has_param("vision"):
rospy.loginfo("has_param, 存在该参数")
else:
rospy.loginfo("has_param, 不存在该参数")
result = rospy.search_param("name")
rospy.loginfo("search_param, result: {}".format(result))
编译执行结果如下: 




评论前必须登录!
注册