 网硕互联帮助中心
网硕互联帮助中心一、背景
现记录一下如何使用URDF搭建双臂UR移动机器人,并在RViz中可视化。
系统:ubunt18.04 ros:melodic 工作空间:UR_ws
写在前面:我使用的是比较麻烦的方法,也就是将两台UR3e的URDF与移动底盘的URDF写到一起了,然后通过display将一个特别长的mobiledualarm.urdf使用RVIZ可视化,所以模块化不是很好,但文章的最后也会介绍一种模块化比较好的方法。
所需材料: 1、移动底盘的URDF模型,路径为:/home/dlut/UR_ws/src/mobiledual0/urdf/mobiledual0.urdf
2、UR3e机械臂URDF,因为最新的UR机械臂ros包中的机器人模型都是使用xacro描述,所以我先将ur3e.xacro转为ur3e.urdf,参见我之前的博客 机器人xacro文件转换成urdf文件方法,并在rviz可视化
小Tip: UR5的RVIZ可以看到黑色的电源线,UR3e就看不到 黑色电源线指向Y轴,垂直向上的为Z轴,通过右手定则确定X轴
切记:电源线指向Y轴,所以对应与base坐标系,而不是base_link坐标系!!!! 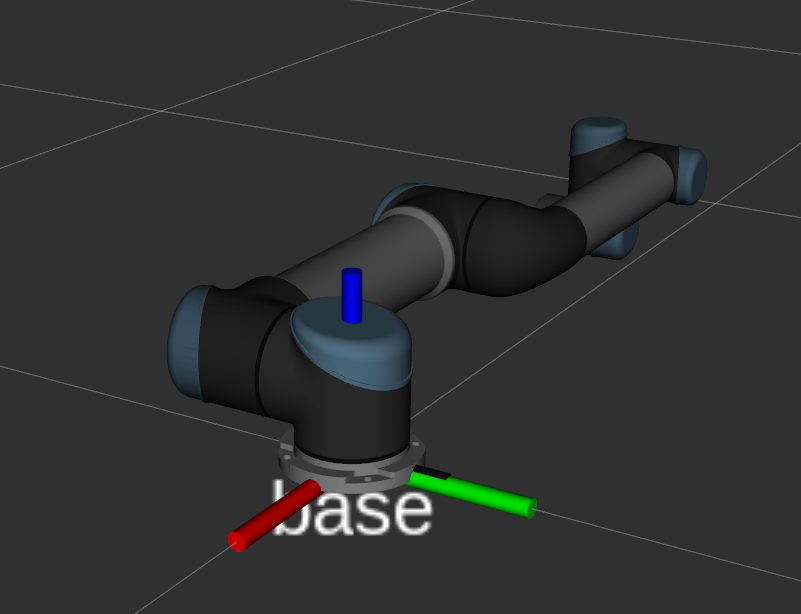
二、使用URDF搭建双臂UR移动机器人
在/home/dlut/UR_ws/src/universal_robot/ur_description/urdf路径下创建mobiledualarm.urdf,完整代码如下:
<?xml version="1.0" encoding="utf-8"?>
<!— =================================================================================== —>
<!— | This document was autogenerated by xacro from ur3e.xacro | —>
<!— | EDITING THIS FILE BY HAND IS NOT RECOMMENDED | —>
<!— =================================================================================== —>
<robot name="ur3e_robot">
<!—
Base UR robot series xacro macro.
NOTE: this is NOT a URDF. It cannot directly be loaded by consumers
expecting a flattened '.urdf' file. See the top–level '.xacro' for that
(but note: that .xacro must still be processed by the xacro command).
For use in '.launch' files: use one of the 'load_urX.launch' convenience
launch files.
This file models the base kinematic chain of a UR robot, which then gets
parameterised by various configuration files to convert it into a UR3(e),
UR5(e), UR10(e) or UR16e.
NOTE: the default kinematic parameters (ie: link lengths, frame locations,
offets, etc) do not correspond to any particular robot. They are defaults
only. There WILL be non–zero offsets between the Forward Kinematics results
in TF (ie: robot_state_publisher) and the values reported by the Teach
Pendant.
For accurate (and robot–specific) transforms, the 'kinematics_parameters_file'
parameter MUST point to a .yaml file containing the appropriate values for
the targetted robot.
If using the UniversalRobots/Universal_Robots_ROS_Driver, follow the steps
described in the readme of that repository to extract the kinematic
calibration from the controller and generate the required .yaml file.
Main author of the migration to yaml configs: Ludovic Delval.
Contributors to previous versions (in no particular order):
– Felix Messmer
– Kelsey Hawkins
– Wim Meeussen
– Shaun Edwards
– Nadia Hammoudeh Garcia
– Dave Hershberger
– G. vd. Hoorn
– Philip Long
– Dave Coleman
– Miguel Prada
– Mathias Luedtke
– Marcel Schnirring
– Felix von Drigalski
– Felix Exner
– Jimmy Da Silva
– Ajit Krisshna N L
– Muhammad Asif Rana
—>
<!—
NOTE: the macro defined in this file is NOT part of the public API of this
package. Users CANNOT rely on this file being available, or stored in
this location. Nor can they rely on the existence of the macro.
—>
<transmission name="shoulder_pan_trans">
<type>transmission_interface/SimpleTransmission</type>
<joint name="shoulder_pan_joint">
<hardwareInterface>hardware_interface/PositionJointInterface</hardwareInterface>
</joint>
<actuator name="shoulder_pan_motor">
<mechanicalReduction>1</mechanicalReduction>
</actuator>
</transmission>
<transmission name="shoulder_lift_trans">
<type>transmission_interface/SimpleTransmission</type>
<joint name="shoulder_lift_joint">
<hardwareInterface>hardware_interface/PositionJointInterface</hardwareInterface>
</joint>
<actuator name="shoulder_lift_motor">
<mechanicalReduction>1</mechanicalReduction>
</actuator>
</transmission>
<transmission name="elbow_trans">
<type>transmission_interface/SimpleTransmission</type>
<joint name="elbow_joint">
<hardwareInterface>hardware_interface/PositionJointInterface</hardwareInterface>
</joint>
<actuator name="elbow_motor">
<mechanicalReduction>1</mechanicalReduction>
</actuator>
</transmission>
<transmission name="wrist_1_trans">
<type>transmission_interface/SimpleTransmission</type>
<joint name="wrist_1_joint">
<hardwareInterface>hardware_interface/PositionJointInterface</hardwareInterface>
</joint>
<actuator name="wrist_1_motor">
<mechanicalReduction>1</mechanicalReduction>
</actuator>
</transmission>
<transmission name="wrist_2_trans">
<type>transmission_interface/SimpleTransmission</type>
<joint name="wrist_2_joint">
<hardwareInterface>hardware_interface/PositionJointInterface</hardwareInterface>
</joint>
<actuator name="wrist_2_motor">
<mechanicalReduction>1</mechanicalReduction>
</actuator>
</transmission>
<transmission name="wrist_3_trans">
<type>transmission_interface/SimpleTransmission</type>
<joint name="wrist_3_joint">
<hardwareInterface>hardware_interface/PositionJointInterface</hardwareInterface>
</joint>
<actuator name="wrist_3_motor">
<mechanicalReduction>1</mechanicalReduction>
</actuator>
</transmission>
<!— links: main serial chain —>
<link name="base_link"/>
<link name="base_link_inertia">
<visual>
<origin rpy="0 0 3.14159265359" xyz="0 0 0"/>
<geometry>
<mesh filename="package://ur_description/meshes/ur3e/visual/base.dae"/>
</geometry>
<material name="LightGrey">
<color rgba="0.7 0.7 0.7 1.0"/>
</material>
</visual>
<collision>
<origin rpy="0 0 3.14159265359" xyz="0 0 0"/>
<geometry>
<mesh filename="package://ur_description/meshes/ur3e/collision/base.stl"/>
</geometry>
</collision>
<inertial>
<mass value="2.0"/>
<origin rpy="0 0 0" xyz="0 0 0"/>
<inertia ixx="0.0030531654454" ixy="0.0" ixz="0.0" iyy="0.0030531654454" iyz="0.0" izz="0.005625"/>
</inertial>
</link>
<link name="shoulder_link">
<visual>
<origin rpy="0 0 3.14159265359" xyz="0 0 0"/>
<geometry>
<mesh filename="package://ur_description/meshes/ur3e/visual/shoulder.dae"/>
</geometry>
<material name="LightGrey">
<color rgba="0.7 0.7 0.7 1.0"/>
</material>
</visual>
<collision>
<origin rpy="0 0 3.14159265359" xyz="0 0 0"/>
<geometry>
<mesh filename="package://ur_description/meshes/ur3e/collision/shoulder.stl"/>
</geometry>
</collision>
<inertial>
<mass value="2.0"/>
<origin rpy="0 0 0" xyz="0 0 0"/>
<inertia ixx="0.0080931634294" ixy="0.0" ixz="0.0" iyy="0.0080931634294" iyz="0.0" izz="0.005625"/>
</inertial>
</link>
<link name="upper_arm_link">
<visual>
<origin rpy="1.57079632679 0 -1.57079632679" xyz="0 0 0.12"/>
<geometry>
<mesh filename="package://ur_description/meshes/ur3e/visual/upperarm.dae"/>
</geometry>
<material name="LightGrey">
<color rgba="0.7 0.7 0.7 1.0"/>
</material>
</visual>
<collision>
<origin rpy="1.57079632679 0 -1.57079632679" xyz="0 0 0.12"/>
<geometry>
<mesh filename="package://ur_description/meshes/ur3e/collision/upperarm.stl"/>
</geometry>
</collision>
<inertial>
<mass value="3.42"/>
<origin rpy="0 1.57079632679 0" xyz="-0.121825 0.0 0.12"/>
<inertia ixx="0.0217284832211" ixy="0.0" ixz="0.0" iyy="0.0217284832211" iyz="0.0" izz="0.00961875"/>
</inertial>
</link>
<link name="forearm_link">
<visual>
<origin rpy="1.57079632679 0 -1.57079632679" xyz="0 0 0.027"/>
<geometry>
<mesh filename="package://ur_description/meshes/ur3e/visual/forearm.dae"/>
</geometry>
<material name="LightGrey">
<color rgba="0.7 0.7 0.7 1.0"/>
</material>
</visual>
<collision>
<origin rpy="1.57079632679 0 -1.57079632679" xyz="0 0 0.027"/>
<geometry>
<mesh filename="package://ur_description/meshes/ur3e/collision/forearm.stl"/>
</geometry>
</collision>
<inertial>
<mass value="1.26"/>
<origin rpy="0 1.57079632679 0" xyz="-0.1066 0.0 0.027"/>
<inertia ixx="0.00654456758217" ixy="0.0" ixz="0.0" iyy="0.00654456758217" iyz="0.0" izz="0.00354375"/>
</inertial>
</link>
<link name="wrist_1_link">
<visual>
<!— TODO: Move this to a parameter —>
<origin rpy="1.57079632679 0 0" xyz="0 0 -0.104"/>
<geometry>
<mesh filename="package://ur_description/meshes/ur3e/visual/wrist1.dae"/>
</geometry>
<material name="LightGrey">
<color rgba="0.7 0.7 0.7 1.0"/>
</material>
</visual>
<collision>
<origin rpy="1.57079632679 0 0" xyz="0 0 -0.104"/>
<geometry>
<mesh filename="package://ur_description/meshes/ur3e/collision/wrist1.stl"/>
</geometry>
</collision>
<inertial>
<mass value="0.8"/>
<origin rpy="0 0 0" xyz="0 0 0"/>
<inertia ixx="0.002084999166" ixy="0.0" ixz="0.0" iyy="0.002084999166" iyz="0.0" izz="0.00225"/>
</inertial>
</link>
<link name="wrist_2_link">
<visual>
<origin rpy="0 0 0" xyz="0 0 -0.08535"/>
<geometry>
<mesh filename="package://ur_description/meshes/ur3e/visual/wrist2.dae"/>
</geometry>
<material name="LightGrey">
<color rgba="0.7 0.7 0.7 1.0"/>
</material>
</visual>
<collision>
<origin rpy="0 0 0" xyz="0 0 -0.08535"/>
<geometry>
<mesh filename="package://ur_description/meshes/ur3e/collision/wrist2.stl"/>
</geometry>
</collision>
<inertial>
<mass value="0.8"/>
<origin rpy="0 0 0" xyz="0 0 0"/>
<inertia ixx="0.002084999166" ixy="0.0" ixz="0.0" iyy="0.002084999166" iyz="0.0" izz="0.00225"/>
</inertial>
</link>
<link name="wrist_3_link">
<visual>
<origin rpy="1.57079632679 0 0" xyz="0 0 -0.0921"/>
<geometry>
<mesh filename="package://ur_description/meshes/ur3e/visual/wrist3.dae"/>
</geometry>
<material name="LightGrey">
<color rgba="0.7 0.7 0.7 1.0"/>
</material>
</visual>
<collision>
<origin rpy="1.57079632679 0 0" xyz="0 0 -0.0921"/>
<geometry>
<mesh filename="package://ur_description/meshes/ur3e/collision/wrist3.stl"/>
</geometry>
</collision>
<inertial>
<mass value="0.35"/>
<origin rpy="0 0 0" xyz="0.0 0.0 -0.02"/>
<inertia ixx="0.00013626661216" ixy="0.0" ixz="0.0" iyy="0.00013626661216" iyz="0.0" izz="0.0001792"/>
</inertial>
</link>
<!— joints: main serial chain —>
<joint name="base_link-base_link_inertia" type="fixed">
<parent link="base_link"/>
<child link="base_link_inertia"/>
<!— 'base_link' is REP–103 aligned (so X+ forward), while the internal
frames of the robot/controller have X+ pointing backwards.
Use the joint between 'base_link' and 'base_link_inertia' (a dummy
link/frame) to introduce the necessary rotation over Z (of pi rad).
—>
<origin rpy="0 0 3.14159265359" xyz="0 0 0"/>
</joint>
<joint name="shoulder_pan_joint" type="revolute">
<parent link="base_link_inertia"/>
<child link="shoulder_link"/>
<origin rpy="0 0 0" xyz="0 0 0.15185"/>
<axis xyz="0 0 1"/>
<limit effort="56.0" lower="-6.28318530718" upper="6.28318530718" velocity="3.14159265359"/>
<dynamics damping="0" friction="0"/>
</joint>
<joint name="shoulder_lift_joint" type="revolute">
<parent link="shoulder_link"/>
<child link="upper_arm_link"/>
<origin rpy="1.570796327 0 0" xyz="0 0 0"/>
<axis xyz="0 0 1"/>
<limit effort="56.0" lower="-6.28318530718" upper="6.28318530718" velocity="3.14159265359"/>
<dynamics damping="0" friction="0"/>
</joint>
<joint name="elbow_joint" type="revolute">
<parent link="upper_arm_link"/>
<child link="forearm_link"/>
<origin rpy="0 0 0" xyz="-0.24355 0 0"/>
<axis xyz="0 0 1"/>
<limit effort="28.0" lower="-3.14159265359" upper="3.14159265359" velocity="3.14159265359"/>
<dynamics damping="0" friction="0"/>
</joint>
<joint name="wrist_1_joint" type="revolute">
<parent link="forearm_link"/>
<child link="wrist_1_link"/>
<origin rpy="0 0 0" xyz="-0.2132 0 0.13105"/>
<axis xyz="0 0 1"/>
<limit effort="12.0" lower="-6.28318530718" upper="6.28318530718" velocity="6.28318530718"/>
<dynamics damping="0" friction="0"/>
</joint>
<joint name="wrist_2_joint" type="revolute">
<parent link="wrist_1_link"/>
<child link="wrist_2_link"/>
<origin rpy="1.570796327 0 0" xyz="0 -0.08535 -1.75055776238e-11"/>
<axis xyz="0 0 1"/>
<limit effort="12.0" lower="-6.28318530718" upper="6.28318530718" velocity="6.28318530718"/>
<dynamics damping="0" friction="0"/>
</joint>
<joint name="wrist_3_joint" type="revolute">
<parent link="wrist_2_link"/>
<child link="wrist_3_link"/>
<origin rpy="1.57079632659 3.14159265359 3.14159265359" xyz="0 0.0921 -1.88900257663e-11"/>
<axis xyz="0 0 1"/>
<limit effort="12.0" lower="-6.28318530718" upper="6.28318530718" velocity="6.28318530718"/>
<dynamics damping="0" friction="0"/>
</joint>
<!— ROS–Industrial 'base' frame: base_link to UR 'Base' Coordinates transform —>
<link name="base"/>
<joint name="base_link-base_fixed_joint" type="fixed">
<!— Note the rotation over Z of pi radians: as base_link is REP–103
aligned (ie: has X+ forward, Y+ left and Z+ up), this is needed
to correctly align 'base' with the 'Base' coordinate system of
the UR controller.
—>
<origin rpy="0 0 3.14159265359" xyz="0 0 0"/>
<parent link="base_link"/>
<child link="base"/>
</joint>
<!— ROS–Industrial 'flange' frame: attachment point for EEF models —>
<link name="flange"/>
<joint name="wrist_3-flange" type="fixed">
<parent link="wrist_3_link"/>
<child link="flange"/>
<origin rpy="0 -1.57079632679 -1.57079632679" xyz="0 0 0"/>
</joint>
<!— ROS–Industrial 'tool0' frame: all–zeros tool frame —>
<link name="tool0"/>
<joint name="flange-tool0" type="fixed">
<!— default toolframe: X+ left, Y+ up, Z+ front —>
<origin rpy="1.57079632679 0 1.57079632679" xyz="0 0 0"/>
<parent link="flange"/>
<child link="tool0"/>
</joint>
<link
name="carbase_link">
<inertial>
<origin
xyz="-0.0140111046811873 -0.330409001171163 -0.018140368676531"
rpy="0 0 0" />
<mass
value="76.2642102199291" />
<inertia
ixx="0.972296954133458"
ixy="-0.000515756621916056"
ixz="-0.00353288568959439"
iyy="1.50934157151189"
iyz="-0.00286721103188841"
izz="0.879992661015933" />
</inertial>
<visual>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://mobiledual0/meshes/carbase_link.STL" />
</geometry>
<material
name="">
<color
rgba="1 1 1 1" />
</material>
</visual>
<collision>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://mobiledual0/meshes/carbase_link.STL" />
</geometry>
</collision>
</link>
<link
name="carzero_Link">
<inertial>
<origin
xyz="-1.63363273751604E-06 -3.7029008717604E-06 -0.00390801617468592"
rpy="0 0 0" />
<mass
value="0.128076565751948" />
<inertia
ixx="0.000250652352757893"
ixy="1.42284195681717E-08"
ixz="-1.92457822817621E-11"
iyy="0.000161503892530106"
iyz="-4.36237731444375E-11"
izz="0.0004107608466446" />
</inertial>
<visual>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://mobiledual0/meshes/carzero_Link.STL" />
</geometry>
<material
name="">
<color
rgba="1 1 1 1" />
</material>
</visual>
<collision>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://mobiledual0/meshes/carzero_Link.STL" />
</geometry>
</collision>
</link>
<joint
name="joint1"
type="fixed">
<origin
xyz="0.163999999999972 -0.212101076872553 0.111375924854946"
rpy="0 -0.785398163397473 1.5707963267949" />
<parent
link="carbase_link" />
<child
link="carzero_Link" />
<axis
xyz="0 0 0" />
</joint>
<link
name="carzero2_Link">
<inertial>
<origin
xyz="-1.63363273940342E-06 3.70290087184366E-06 -0.00409198382531417"
rpy="0 0 0" />
<mass
value="0.128076565751948" />
<inertia
ixx="0.000250652352757893"
ixy="-1.42284195686405E-08"
ixz="1.92457822953147E-11"
iyy="0.000161503892530106"
iyz="-4.36237731693912E-11"
izz="0.000410760846644599" />
</inertial>
<visual>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://mobiledual0/meshes/carzero2_Link.STL" />
</geometry>
<material
name="">
<color
rgba="1 1 1 1" />
</material>
</visual>
<collision>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://mobiledual0/meshes/carzero2_Link.STL" />
</geometry>
</collision>
</link>
<joint
name="joint2"
type="fixed">
<origin
xyz="0 0.327999999999944 0.000183967650620315"
rpy="0 0 0" />
<parent
link="carzero_Link" />
<child
link="carzero2_Link" />
<axis
xyz="0 0 0" />
</joint>
<joint name="right_arm_attach" type="fixed">
<child link="base_link" />
<parent link="carzero2_Link" />
<origin xyz="0 0.0 0" rpy="0 0 0" />
</joint>
<!— links: main serial chain —>
<link name="base_link1"/>
<link name="base_link_inertia1">
<visual>
<origin rpy="0 0 3.14159265359" xyz="0 0 0"/>
<geometry>
<mesh filename="package://ur_description/meshes/ur3e/visual/base.dae"/>
</geometry>
<material name="LightGrey">
<color rgba="0.7 0.7 0.7 1.0"/>
</material>
</visual>
<collision>
<origin rpy="0 0 3.14159265359" xyz="0 0 0"/>
<geometry>
<mesh filename="package://ur_description/meshes/ur3e/collision/base.stl"/>
</geometry>
</collision>
<inertial>
<mass value="2.0"/>
<origin rpy="0 0 0" xyz="0 0 0"/>
<inertia ixx="0.0030531654454" ixy="0.0" ixz="0.0" iyy="0.0030531654454" iyz="0.0" izz="0.005625"/>
</inertial>
</link>
<link name="shoulder_link1">
<visual>
<origin rpy="0 0 3.14159265359" xyz="0 0 0"/>
<geometry>
<mesh filename="package://ur_description/meshes/ur3e/visual/shoulder.dae"/>
</geometry>
<material name="LightGrey">
<color rgba="0.7 0.7 0.7 1.0"/>
</material>
</visual>
<collision>
<origin rpy="0 0 3.14159265359" xyz="0 0 0"/>
<geometry>
<mesh filename="package://ur_description/meshes/ur3e/collision/shoulder.stl"/>
</geometry>
</collision>
<inertial>
<mass value="2.0"/>
<origin rpy="0 0 0" xyz="0 0 0"/>
<inertia ixx="0.0080931634294" ixy="0.0" ixz="0.0" iyy="0.0080931634294" iyz="0.0" izz="0.005625"/>
</inertial>
</link>
<link name="upper_arm_link1">
<visual>
<origin rpy="1.57079632679 0 -1.57079632679" xyz="0 0 0.12"/>
<geometry>
<mesh filename="package://ur_description/meshes/ur3e/visual/upperarm.dae"/>
</geometry>
<material name="LightGrey">
<color rgba="0.7 0.7 0.7 1.0"/>
</material>
</visual>
<collision>
<origin rpy="1.57079632679 0 -1.57079632679" xyz="0 0 0.12"/>
<geometry>
<mesh filename="package://ur_description/meshes/ur3e/collision/upperarm.stl"/>
</geometry>
</collision>
<inertial>
<mass value="3.42"/>
<origin rpy="0 1.57079632679 0" xyz="-0.121825 0.0 0.12"/>
<inertia ixx="0.0217284832211" ixy="0.0" ixz="0.0" iyy="0.0217284832211" iyz="0.0" izz="0.00961875"/>
</inertial>
</link>
<link name="forearm_link1">
<visual>
<origin rpy="1.57079632679 0 -1.57079632679" xyz="0 0 0.027"/>
<geometry>
<mesh filename="package://ur_description/meshes/ur3e/visual/forearm.dae"/>
</geometry>
<material name="LightGrey">
<color rgba="0.7 0.7 0.7 1.0"/>
</material>
</visual>
<collision>
<origin rpy="1.57079632679 0 -1.57079632679" xyz="0 0 0.027"/>
<geometry>
<mesh filename="package://ur_description/meshes/ur3e/collision/forearm.stl"/>
</geometry>
</collision>
<inertial>
<mass value="1.26"/>
<origin rpy="0 1.57079632679 0" xyz="-0.1066 0.0 0.027"/>
<inertia ixx="0.00654456758217" ixy="0.0" ixz="0.0" iyy="0.00654456758217" iyz="0.0" izz="0.00354375"/>
</inertial>
</link>
<link name="wrist_1_link1">
<visual>
<!— TODO: Move this to a parameter —>
<origin rpy="1.57079632679 0 0" xyz="0 0 -0.104"/>
<geometry>
<mesh filename="package://ur_description/meshes/ur3e/visual/wrist1.dae"/>
</geometry>
<material name="LightGrey">
<color rgba="0.7 0.7 0.7 1.0"/>
</material>
</visual>
<collision>
<origin rpy="1.57079632679 0 0" xyz="0 0 -0.104"/>
<geometry>
<mesh filename="package://ur_description/meshes/ur3e/collision/wrist1.stl"/>
</geometry>
</collision>
<inertial>
<mass value="0.8"/>
<origin rpy="0 0 0" xyz="0 0 0"/>
<inertia ixx="0.002084999166" ixy="0.0" ixz="0.0" iyy="0.002084999166" iyz="0.0" izz="0.00225"/>
</inertial>
</link>
<link name="wrist_2_link1">
<visual>
<origin rpy="0 0 0" xyz="0 0 -0.08535"/>
<geometry>
<mesh filename="package://ur_description/meshes/ur3e/visual/wrist2.dae"/>
</geometry>
<material name="LightGrey">
<color rgba="0.7 0.7 0.7 1.0"/>
</material>
</visual>
<collision>
<origin rpy="0 0 0" xyz="0 0 -0.08535"/>
<geometry>
<mesh filename="package://ur_description/meshes/ur3e/collision/wrist2.stl"/>
</geometry>
</collision>
<inertial>
<mass value="0.8"/>
<origin rpy="0 0 0" xyz="0 0 0"/>
<inertia ixx="0.002084999166" ixy="0.0" ixz="0.0" iyy="0.002084999166" iyz="0.0" izz="0.00225"/>
</inertial>
</link>
<link name="wrist_3_link1">
<visual>
<origin rpy="1.57079632679 0 0" xyz="0 0 -0.0921"/>
<geometry>
<mesh filename="package://ur_description/meshes/ur3e/visual/wrist3.dae"/>
</geometry>
<material name="LightGrey">
<color rgba="0.7 0.7 0.7 1.0"/>
</material>
</visual>
<collision>
<origin rpy="1.57079632679 0 0" xyz="0 0 -0.0921"/>
<geometry>
<mesh filename="package://ur_description/meshes/ur3e/collision/wrist3.stl"/>
</geometry>
</collision>
<inertial>
<mass value="0.35"/>
<origin rpy="0 0 0" xyz="0.0 0.0 -0.02"/>
<inertia ixx="0.00013626661216" ixy="0.0" ixz="0.0" iyy="0.00013626661216" iyz="0.0" izz="0.0001792"/>
</inertial>
</link>
<!— joints: main serial chain —>
<joint name="base_link-base_link_inertia1" type="fixed">
<parent link="base_link1"/>
<child link="base_link_inertia1"/>
<!— 'base_link' is REP–103 aligned (so X+ forward), while the internal
frames of the robot/controller have X+ pointing backwards.
Use the joint between 'base_link' and 'base_link_inertia' (a dummy
link/frame) to introduce the necessary rotation over Z (of pi rad).
—>
<origin rpy="0 0 3.14159265359" xyz="0 0 0"/>
</joint>
<joint name="shoulder_pan_joint1" type="revolute">
<parent link="base_link_inertia1"/>
<child link="shoulder_link1"/>
<origin rpy="0 0 0" xyz="0 0 0.15185"/>
<axis xyz="0 0 1"/>
<limit effort="56.0" lower="-6.28318530718" upper="6.28318530718" velocity="3.14159265359"/>
<dynamics damping="0" friction="0"/>
</joint>
<joint name="shoulder_lift_joint1" type="revolute">
<parent link="shoulder_link1"/>
<child link="upper_arm_link1"/>
<origin rpy="1.570796327 0 0" xyz="0 0 0"/>
<axis xyz="0 0 1"/>
<limit effort="56.0" lower="-6.28318530718" upper="6.28318530718" velocity="3.14159265359"/>
<dynamics damping="0" friction="0"/>
</joint>
<joint name="elbow_joint1" type="revolute">
<parent link="upper_arm_link1"/>
<child link="forearm_link1"/>
<origin rpy="0 0 0" xyz="-0.24355 0 0"/>
<axis xyz="0 0 1"/>
<limit effort="28.0" lower="-3.14159265359" upper="3.14159265359" velocity="3.14159265359"/>
<dynamics damping="0" friction="0"/>
</joint>
<joint name="wrist_1_joint1" type="revolute">
<parent link="forearm_link1"/>
<child link="wrist_1_link1"/>
<origin rpy="0 0 0" xyz="-0.2132 0 0.13105"/>
<axis xyz="0 0 1"/>
<limit effort="12.0" lower="-6.28318530718" upper="6.28318530718" velocity="6.28318530718"/>
<dynamics damping="0" friction="0"/>
</joint>
<joint name="wrist_2_joint1" type="revolute">
<parent link="wrist_1_link1"/>
<child link="wrist_2_link1"/>
<origin rpy="1.570796327 0 0" xyz="0 -0.08535 -1.75055776238e-11"/>
<axis xyz="0 0 1"/>
<limit effort="12.0" lower="-6.28318530718" upper="6.28318530718" velocity="6.28318530718"/>
<dynamics damping="0" friction="0"/>
</joint>
<joint name="wrist_3_joint1" type="revolute">
<parent link="wrist_2_link1"/>
<child link="wrist_3_link1"/>
<origin rpy="1.57079632659 3.14159265359 3.14159265359" xyz="0 0.0921 -1.88900257663e-11"/>
<axis xyz="0 0 1"/>
<limit effort="12.0" lower="-6.28318530718" upper="6.28318530718" velocity="6.28318530718"/>
<dynamics damping="0" friction="0"/>
</joint>
<!— ROS–Industrial 'base' frame: base_link to UR 'Base' Coordinates transform —>
<link name="base1"/>
<joint name="base_link-base_fixed_joint1" type="fixed">
<!— Note the rotation over Z of pi radians: as base_link is REP–103
aligned (ie: has X+ forward, Y+ left and Z+ up), this is needed
to correctly align 'base' with the 'Base' coordinate system of
the UR controller.
—>
<origin rpy="0 0 3.14159265359" xyz="0 0 0"/>
<parent link="base_link1"/>
<child link="base1"/>
</joint>
<!— ROS–Industrial 'flange' frame: attachment point for EEF models —>
<link name="flange1"/>
<joint name="wrist_3-flange1" type="fixed">
<parent link="wrist_3_link1"/>
<child link="flange1"/>
<origin rpy="0 -1.57079632679 -1.57079632679" xyz="0 0 0"/>
</joint>
<!— ROS–Industrial 'tool0' frame: all–zeros tool frame —>
<link name="tool01"/>
<joint name="flange-tool01" type="fixed">
<!— default toolframe: X+ left, Y+ up, Z+ front —>
<origin rpy="1.57079632679 0 1.57079632679" xyz="0 0 0"/>
<parent link="flange1"/>
<child link="tool01"/>
</joint>
<joint name="left_arm_attach" type="fixed">
<child link="base_link1" />
<parent link="carzero_Link" />
<origin xyz="0 0.0 0" rpy="0 0 0" />
</joint>
</robot>
整个代码的逻辑就是将两台UR机械臂的URDF与移动底盘的URDF整合到一起,需要注意的三个地方是 1、因为两个UR3e机械臂的URDF模型在同一个文件下,所以需要重命名第二个机械臂的所以关节和连杆的名称,避免重复。我把左臂所有关节和连杆名称的后面都加了一个1,左臂代码为520-768行;右臂代码为1-358行;移动底盘代码360-511行
2、除了简单的将三部分的urdf复制到一起,我还额外创建了两个关节,用于连接左臂和移动底盘、以及连接右臂和移动底盘。 以右臂为例,具体为:
<joint name="right_arm_attach" type="fixed">
<child link="base_link" />
<parent link="carzero2_Link" />
<origin xyz="0 0.0 0" rpy="0 0 0" />
</joint>
3、如果报错Failed to find root link: Two root links found: [base_link1] and [carbase_link] 那是因为:robot_state_publisher在处理URDF时发现两个根链接(base_link和carbase_link),导致无法构建TF树。ROS要求URDF只有一个根链接(即没有父链接的链接),否则会报“Failed to find root link”错误。 所以第2步就是解决办法,新建一个关节,将机械臂的base_link与小车的carzero2_Link串联到一起。
三、RViz可视化
单臂可视化:
cd UR_ws
source devel/setup.bash
roslaunch ur_description view_ur3e.launch
双臂可视化:
cd UR_ws
source devel/setup.bash
roslaunch ur_description display.launch
其中display.launch完整代码如下:
<launch>
<arg
name="model" />
<param
name="robot_description"
textfile="$(find ur_description)/urdf/mobiledualarm.urdf" />
<node
name="joint_state_publisher_gui"
pkg="joint_state_publisher_gui"
type="joint_state_publisher_gui" />
<node
name="robot_state_publisher"
pkg="robot_state_publisher"
type="robot_state_publisher" />
<node
name="rviz"
pkg="rviz"
type="rviz"
args="-d $(find ur_description)/urdf.rviz" />
</launch>
四、效果展示

五、模块化方法(供参考)
这里我重建创建了一个工作空间:DualUR_ws





评论前必须登录!
注册