 网硕互联帮助中心
网硕互联帮助中心stm32学习
三.通信
10.BKP和RTC
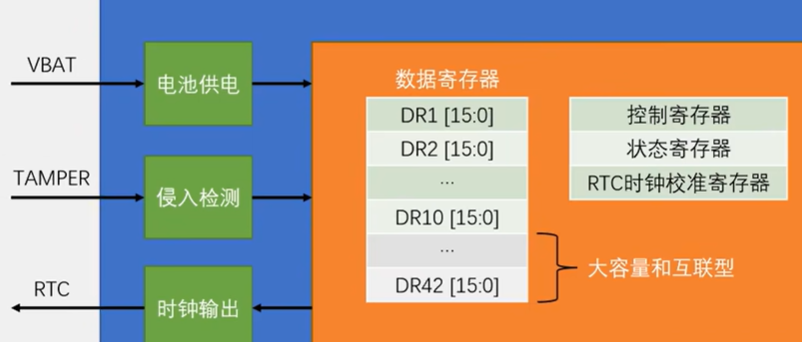
BKP(backup registers)备份寄存器 BKP可以存储数据,掉电丢失,平时用外部电源供电,外部电源切断后用VBAT维持供电,当系统在待机状态下被唤醒,或系统复位或电源复位时,它们也不会被复位 TAMPER引脚可以产生的侵入事件,将所有备份寄存器的内容清除 RTC引脚可以输出RTC校准时钟(对内部RTC微小的误差进行校准)、RTC闹钟脉冲、秒脉冲(可以输出出来,为别的设备提供信号) PC13、TAMPER、RTC共用一个引脚,同时只能使用一个功能 存储RTC时钟校准寄存器,联合RTC校准时钟,对RTC进行校准 用户数据存储容量:20字节(中容量和小容量)/84字节(大容量和互联型)
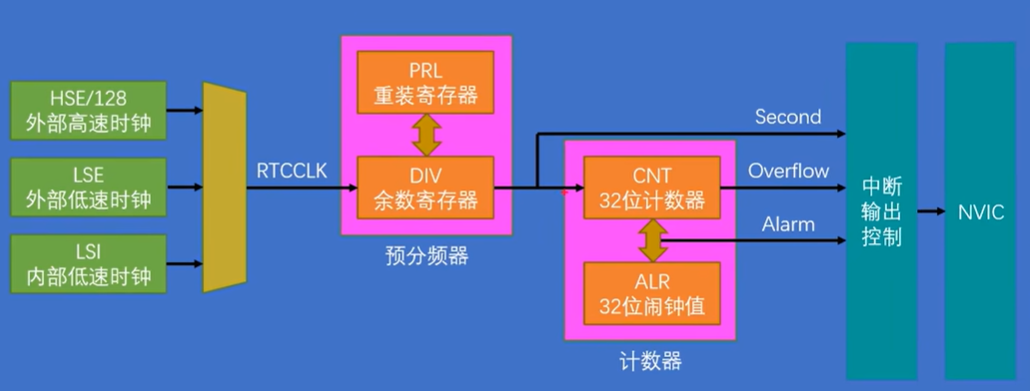
RTC实时时钟,是一个独立的定时器,可为系统提供时钟和日历的功能 RTC和时钟配置系统处于后备区域,系统复位时数据不清零,VDD断电后可借助VBAT供电 32位的可编程计数器,可对应Unix时间戳的秒计数器 20位的可编程预分频器,可适配不同频率的输入时钟 可选择的三种RTC时钟源:
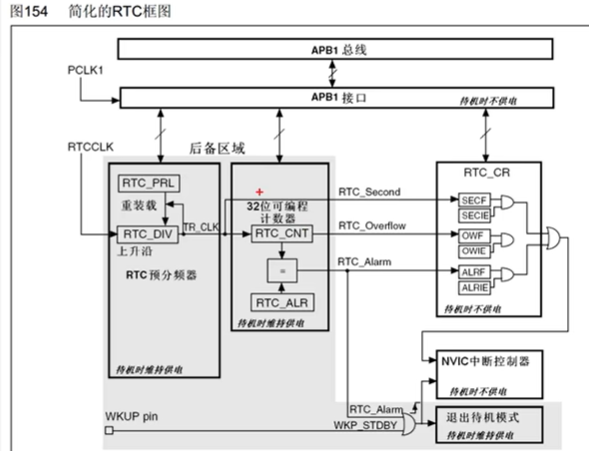
RTC框图:
RTC基本结构:
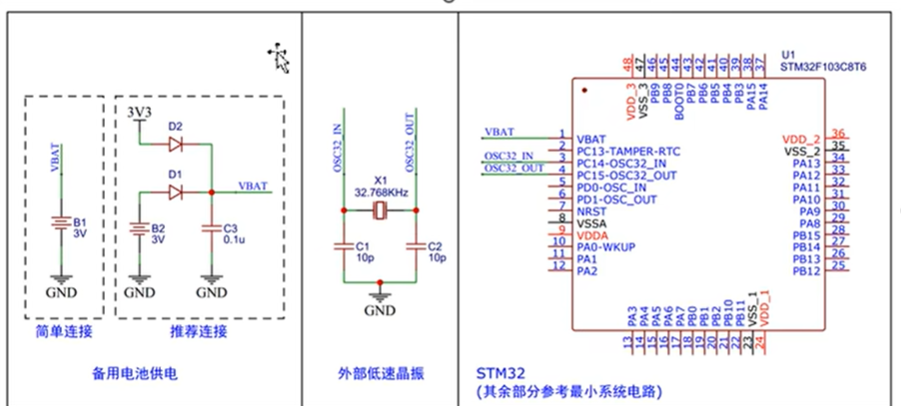
硬件电路:
RTC操作注意事项:
读写备份寄存器的初始化只需要
/*开启时钟*/
RCC_APB1PeriphClockCmd(RCC_APB1Periph_PWR, ENABLE); //开启PWR的时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_BKP, ENABLE); //开启BKP的时钟
/*备份寄存器访问使能*/
PWR_BackupAccessCmd(ENABLE); //使用PWR开启对备份寄存器的访问
然后就可以用BKP_ReadBackupRegister和BKP_WriteBackupRegister来读写寄存器
RTC初始化和RTC读写时间的函数:
#include "stm32f10x.h" // Device header
#include <time.h>
uint16_t MyRTC_Time[] = {2023, 1, 1, 23, 59, 55}; //定义全局的时间数组,数组内容分别为年、月、日、时、分、秒
void MyRTC_SetTime(void); //函数声明
/**
* 函 数:RTC初始化
* 参 数:无
* 返 回 值:无
*/
void MyRTC_Init(void)
{
/*开启时钟*/
RCC_APB1PeriphClockCmd(RCC_APB1Periph_PWR, ENABLE); //开启PWR的时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_BKP, ENABLE); //开启BKP的时钟
/*备份寄存器访问使能*/
PWR_BackupAccessCmd(ENABLE); //使用PWR开启对备份寄存器的访问
if (BKP_ReadBackupRegister(BKP_DR1) != 0xA5A5) //通过写入备份寄存器的标志位,判断RTC是否是第一次配置
//if成立则执行第一次的RTC配置
{
RCC_LSEConfig(RCC_LSE_ON); //开启LSE时钟
while (RCC_GetFlagStatus(RCC_FLAG_LSERDY) != SET); //等待LSE准备就绪
RCC_RTCCLKConfig(RCC_RTCCLKSource_LSE); //选择RTCCLK来源为LSE
RCC_RTCCLKCmd(ENABLE); //RTCCLK使能
RTC_WaitForSynchro(); //等待同步
RTC_WaitForLastTask(); //等待上一次操作完成
RTC_SetPrescaler(32768 – 1); //设置RTC预分频器,预分频后的计数频率为1Hz
RTC_WaitForLastTask(); //等待上一次操作完成
MyRTC_SetTime(); //设置时间,调用此函数,全局数组里时间值刷新到RTC硬件电路
BKP_WriteBackupRegister(BKP_DR1, 0xA5A5); //在备份寄存器写入自己规定的标志位,用于判断RTC是不是第一次执行配置
}
else //RTC不是第一次配置
{
RTC_WaitForSynchro(); //等待同步
RTC_WaitForLastTask(); //等待上一次操作完成
}
}
//如果LSE无法起振导致程序卡死在初始化函数中
//可将初始化函数替换为下述代码,使用LSI当作RTCCLK
//LSI无法由备用电源供电,故主电源掉电时,RTC走时会暂停
/*
void MyRTC_Init(void)
{
RCC_APB1PeriphClockCmd(RCC_APB1Periph_PWR, ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_BKP, ENABLE);
PWR_BackupAccessCmd(ENABLE);
if (BKP_ReadBackupRegister(BKP_DR1) != 0xA5A5)
{
RCC_LSICmd(ENABLE);
while (RCC_GetFlagStatus(RCC_FLAG_LSIRDY) != SET);
RCC_RTCCLKConfig(RCC_RTCCLKSource_LSI);
RCC_RTCCLKCmd(ENABLE);
RTC_WaitForSynchro();
RTC_WaitForLastTask();
RTC_SetPrescaler(40000 – 1);
RTC_WaitForLastTask();
MyRTC_SetTime();
BKP_WriteBackupRegister(BKP_DR1, 0xA5A5);
}
else
{
RCC_LSICmd(ENABLE); //即使不是第一次配置,也需要再次开启LSI时钟
while (RCC_GetFlagStatus(RCC_FLAG_LSIRDY) != SET);
RCC_RTCCLKConfig(RCC_RTCCLKSource_LSI);
RCC_RTCCLKCmd(ENABLE);
RTC_WaitForSynchro();
RTC_WaitForLastTask();
}
}*/
/**
* 函 数:RTC设置时间
* 参 数:无
* 返 回 值:无
* 说 明:调用此函数后,全局数组里时间值将刷新到RTC硬件电路
*/
void MyRTC_SetTime(void)
{
time_t time_cnt; //定义秒计数器数据类型
struct tm time_date; //定义日期时间数据类型
time_date.tm_year = MyRTC_Time[0] – 1900; //将数组的时间赋值给日期时间结构体
time_date.tm_mon = MyRTC_Time[1] – 1;
time_date.tm_mday = MyRTC_Time[2];
time_date.tm_hour = MyRTC_Time[3];
time_date.tm_min = MyRTC_Time[4];
time_date.tm_sec = MyRTC_Time[5];
time_cnt = mktime(&time_date) – 8 * 60 * 60; //调用mktime函数,将日期时间转换为秒计数器格式
//- 8 * 60 * 60为东八区的时区调整
RTC_SetCounter(time_cnt); //将秒计数器写入到RTC的CNT中
RTC_WaitForLastTask(); //等待上一次操作完成
}
/**
* 函 数:RTC读取时间
* 参 数:无
* 返 回 值:无
* 说 明:调用此函数后,RTC硬件电路里时间值将刷新到全局数组
*/
void MyRTC_ReadTime(void)
{
time_t time_cnt; //定义秒计数器数据类型
struct tm time_date; //定义日期时间数据类型
time_cnt = RTC_GetCounter() + 8 * 60 * 60; //读取RTC的CNT,获取当前的秒计数器
//+ 8 * 60 * 60为东八区的时区调整
time_date = *localtime(&time_cnt); //使用localtime函数,将秒计数器转换为日期时间格式
MyRTC_Time[0] = time_date.tm_year + 1900; //将日期时间结构体赋值给数组的时间
MyRTC_Time[1] = time_date.tm_mon + 1;
MyRTC_Time[2] = time_date.tm_mday;
MyRTC_Time[3] = time_date.tm_hour;
MyRTC_Time[4] = time_date.tm_min;
MyRTC_Time[5] = time_date.tm_sec;
}
然后在main.c的while里面调用MyRTC_ReadTime就能读取实时时钟了
11.PWR
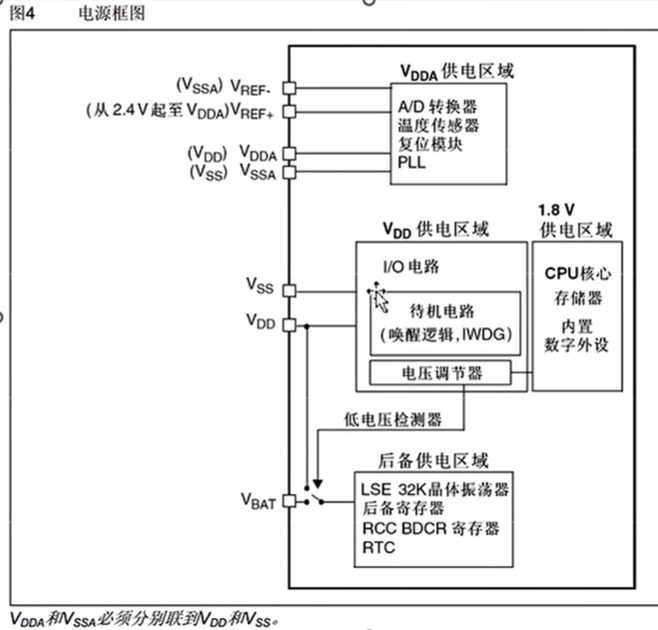
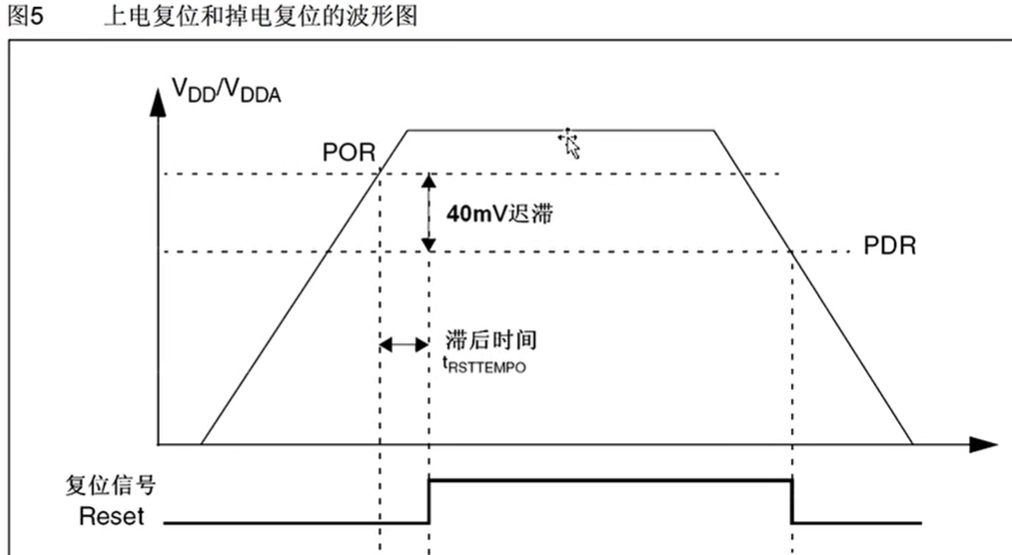
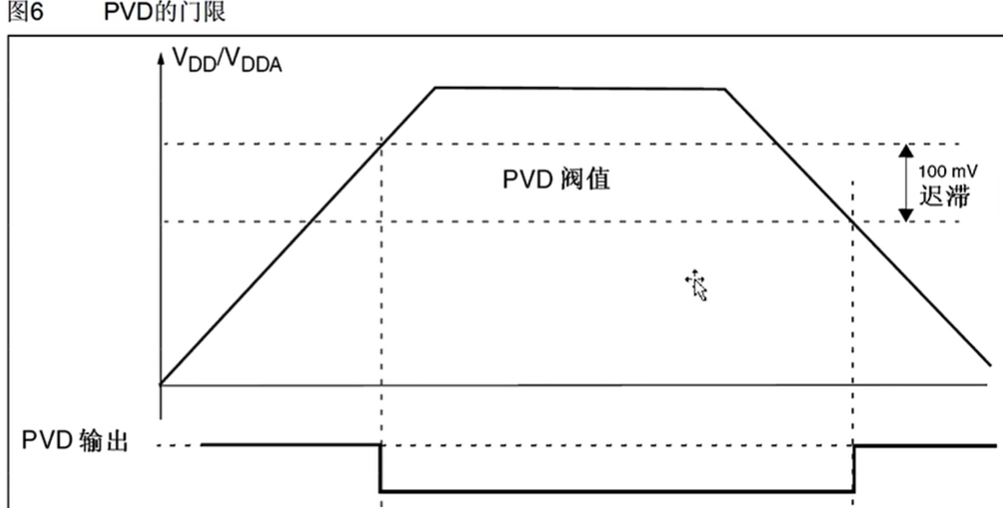
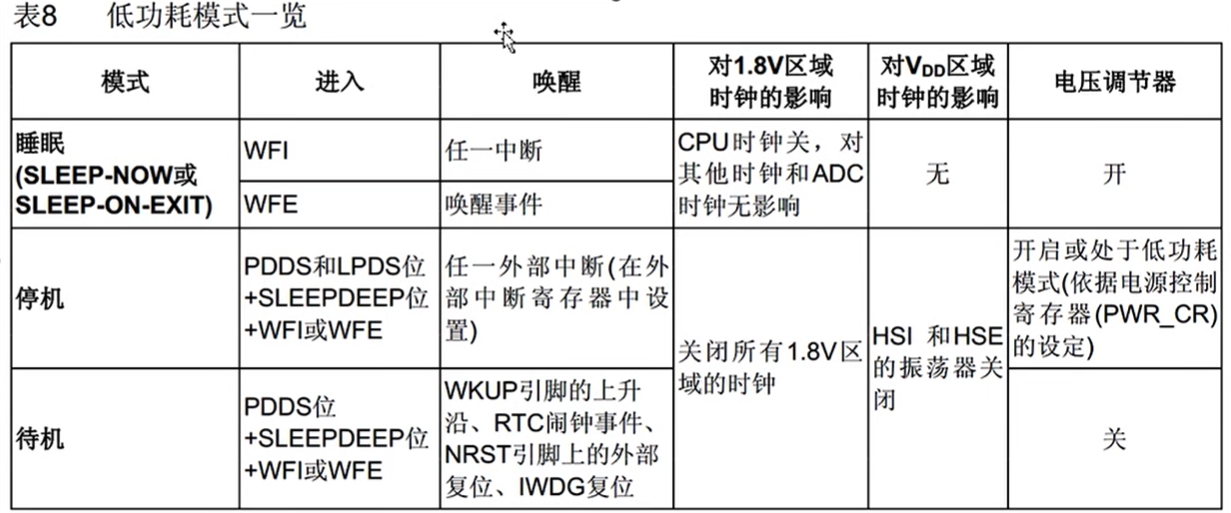
PWR电源控制:PWR负责管理stm32内部的电源供电部分,可以实现可编程电压监测器和低功耗模式的功能 可编程电压监测器(PVD)可以监控VDD电源电压,当VDD下降到PVD阈值以下或者之上时,PVD会触发中断,用于执行紧急关闭任务 低功耗功能包括睡眠模式(sleep)、停机模式(stop)、和待机模式(standby),可在系统空闲时,降低stm32的功耗,延长设备的使用时间,睡眠模式一般省电,停机模式比较省电,待机模式极为省电
电源框图:
上电复位和掉电复位的波形图:
PVD的门限:
低功耗模式一览:
模式细分:
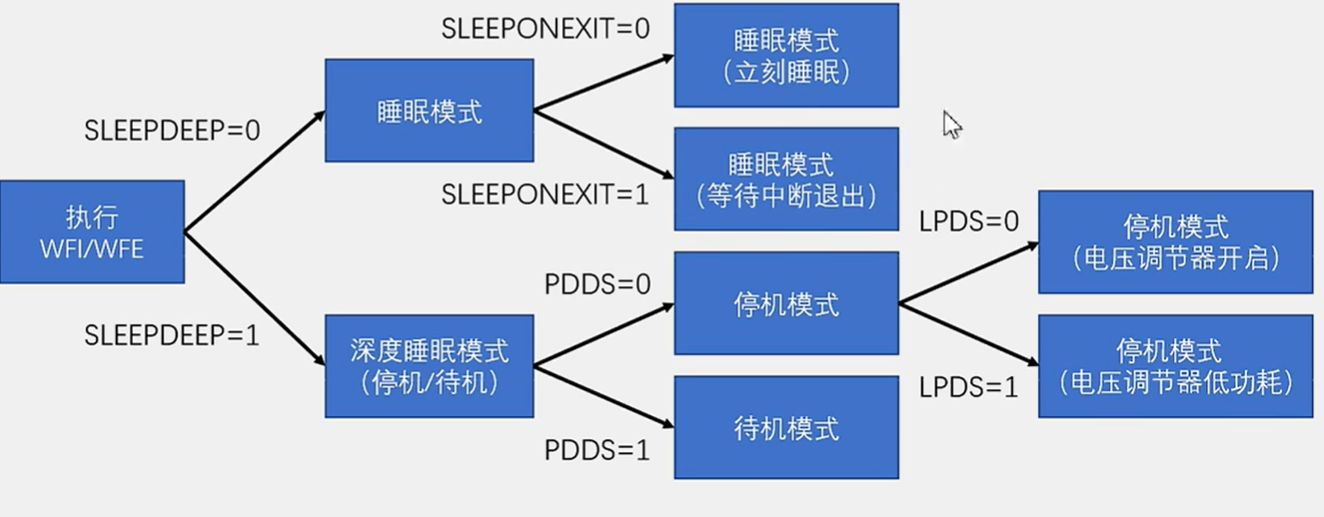
睡眠模式:
停止模式:
待机模式:
代码: 修改主频: (在system_stm32f10x.c中将其它的注释掉就行)
/* #define SYSCLK_FREQ_HSE HSE_VALUE */
/* #define SYSCLK_FREQ_24MHz 24000000 */
#define SYSCLK_FREQ_36MHz 36000000
/* #define SYSCLK_FREQ_48MHz 48000000 */
/* #define SYSCLK_FREQ_56MHz 56000000 */
/* #define SYSCLK_FREQ_72MHz 72000000 */
库函数中已经宏定义了SystemCoreClock:时钟频率 启动睡眠模式: (串口发送接收会打断睡眠模式)
__WFI(); //执行WFI指令,CPU睡眠,并等待中断唤醒,WFI的内核是汇编代码
//__WFE(); //中断事件,配置比WFI难,所以一般用上面的
启动停止模式: (烧录前需要按住复位键,烧录完之后松开,外部中断能中断停止模式)
RCC_APB1PeriphClockCmd(RCC_APB1Periph_PWR, ENABLE);
//开启PWR的时钟
//停止模式和待机模式一定要记得开启
PWR_EnterSTOPMode(PWR_Regulator_ON, PWR_STOPEntry_WFI);
//STM32进入停止模式,并等待中断唤醒
SystemInit(); //唤醒后,要重新配置时钟
待机模式: (同样要按住复位键)
RCC_APB1PeriphClockCmd(RCC_APB1Periph_PWR, ENABLE);
//开启PWR的时钟
//停止模式和待机模式一定要记得开启
PWR_EnterSTANDBYMode();
//STM32进入停止模式,并等待指定的唤醒事件(WKUP上升沿或RTC闹钟)
四.看门狗
1.独立看门狗
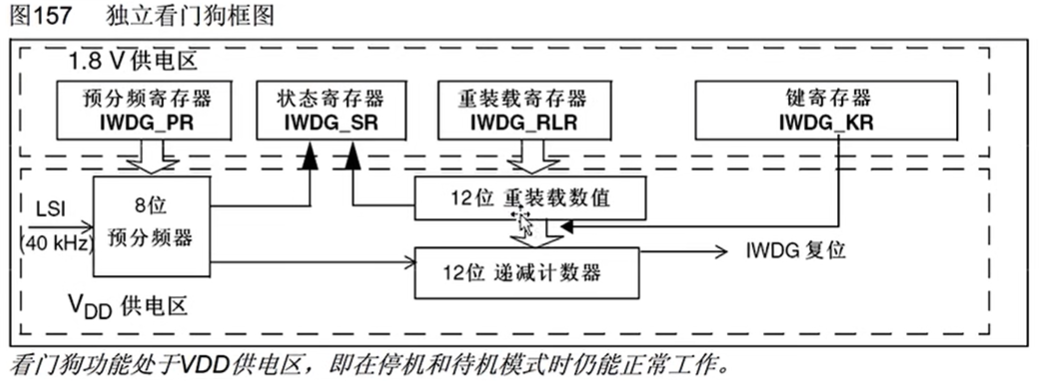
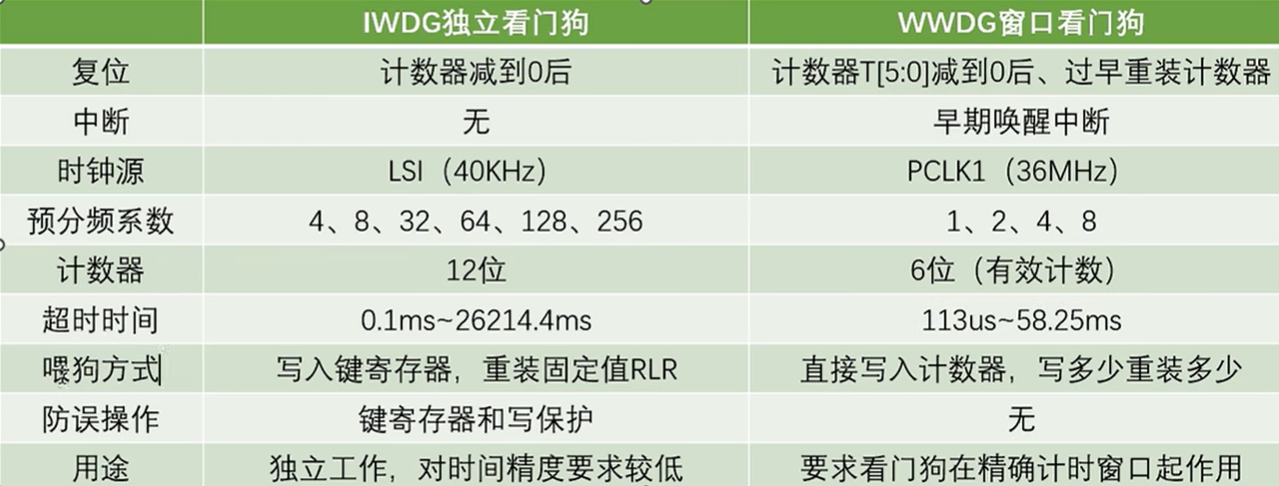
WDG(Watchdog)看门狗:看门狗可以监控程序的运行状态,当程序因为设计漏洞、硬件故障、电磁干扰等原因,出现卡死或者跑飞现象时,看门狗能及时复位程序,避免程序陷入长时间的罢工状态,保证系统的可靠性和安全性 看门狗本质上是一个定时器,当指定时间范围内,程序没有执行喂狗(重置计数器)操作时,看门狗硬件电路就自动产生复位信号 stm32内置两个看门狗: 独立看门狗(IWDG):独立工作,对时间精度要求较低 窗口看门狗(WWDG):要求看门狗在精确计时窗口起作用 IWDG框图:
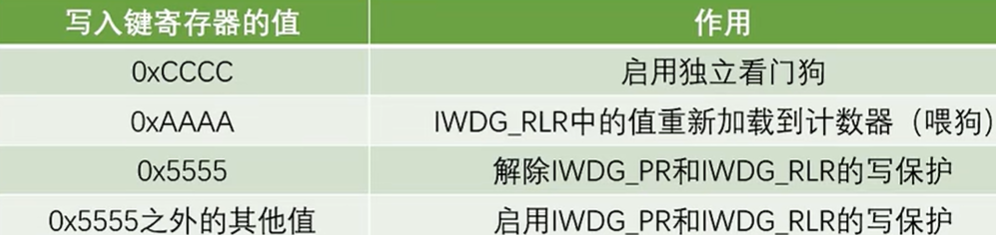
IWDG键寄存器:键寄存器本质上是控制寄存器,用于控制硬件电路的工作 在可能存在干扰的情况下,一般通过在整个键寄存器写入特定值来代替控制寄存器写入一位的功能,以降低硬件电路收到干扰的概率
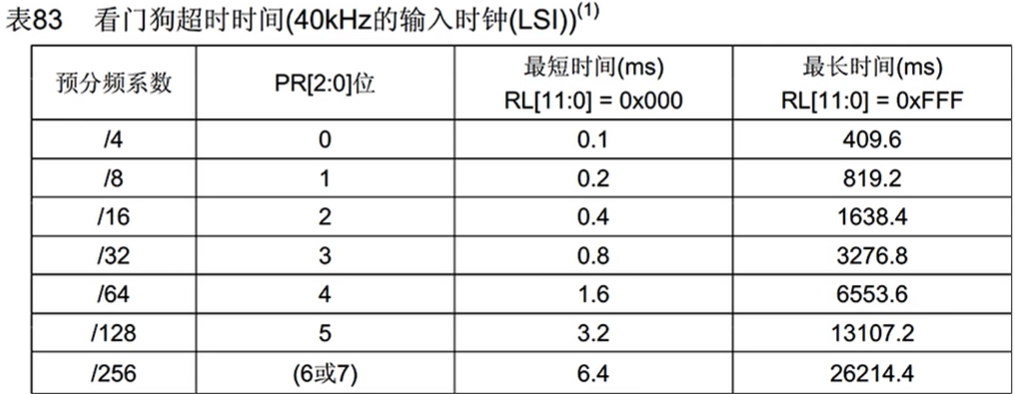
超时时间:
T
I
W
D
G
=
T
L
S
I
×
P
R
预分频系数
×
(
R
L
+
1
)
T_{IWDG} = T_{LSI} \\times PR预分频系数 \\times (RL + 1)
TIWDG=TLSI×PR预分频系数×(RL+1) 其中:
T
L
S
I
=
1
F
L
S
I
T_{LSI} = \\frac{1}{F_{LSI}}
TLSI=FLSI1
2.窗口看门狗
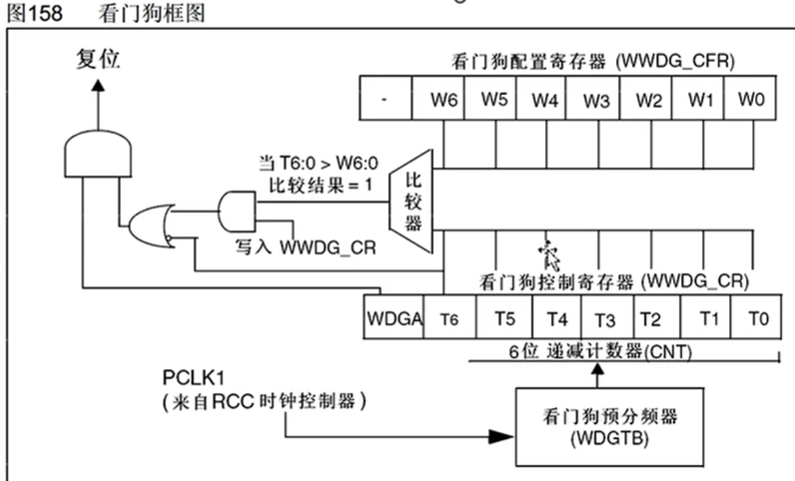
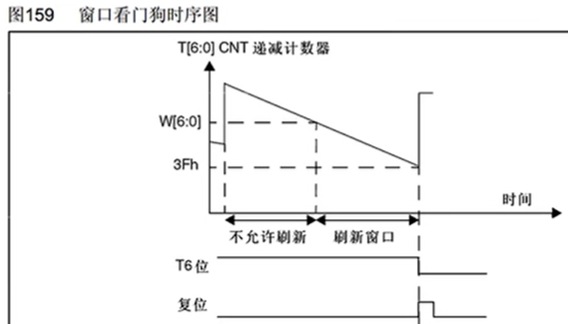
WWDG工作特性:
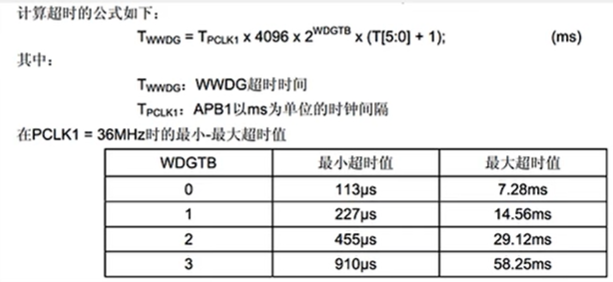
WWDG超时时间: 超时时间:
T
W
W
D
G
=
T
P
C
L
K
1
×
4096
×
W
D
G
T
B
预分频系数
×
(
T
[
5
:
0
]
+
1
)
T_{WWDG} = T_{PCLK1} \\times 4096 \\times WDGTB预分频系数 \\times (T[5:0] + 1)
TWWDG=TPCLK1×4096×WDGTB预分频系数×(T[5:0]+1) 窗口时间:
T
W
I
N
=
T
P
C
L
K
1
×
4096
×
W
D
G
T
B
预分频系数
×
(
T
[
5
:
0
]
−
W
[
5
:
0
]
)
T_{WIN} = T_{PCLK1} \\times 4096 \\times WDGTB预分频系数 \\times (T[5:0] – W[5:0])
TWIN=TPCLK1×4096×WDGTB预分频系数×(T[5:0]−W[5:0]) 其中:
T
P
C
L
K
1
=
1
F
P
C
L
K
1
T_{PCLK1} = \\frac{1}{F_{PCLK1}}
TPCLK1=FPCLK11
IWDG和WWDG对比:
3.独立看门狗的代码
看门狗的代码较为简单,所以就直接放在main.c里面
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "Key.h"
int main(void)
{
/*模块初始化*/
OLED_Init(); //OLED初始化
Key_Init(); //按键初始化
/*显示静态字符串*/
OLED_ShowString(1, 1, "IWDG TEST");
/*判断复位信号来源*/
if (RCC_GetFlagStatus(RCC_FLAG_IWDGRST) == SET) //如果是独立看门狗复位
{
OLED_ShowString(2, 1, "IWDGRST"); //OLED闪烁IWDGRST字符串
Delay_ms(500);
OLED_ShowString(2, 1, " ");
Delay_ms(100);
RCC_ClearFlag(); //清除标志位
}
else //否则,即为其他复位
{
OLED_ShowString(3, 1, "RST"); //OLED闪烁RST字符串
Delay_ms(500);
OLED_ShowString(3, 1, " ");
Delay_ms(100);
}
/*IWDG初始化*/
IWDG_WriteAccessCmd(IWDG_WriteAccess_Enable); //独立看门狗写使能
IWDG_SetPrescaler(IWDG_Prescaler_16); //设置预分频为16
IWDG_SetReload(2499); //设置重装值为2499,独立看门狗的超时时间为1000ms
IWDG_ReloadCounter(); //重装计数器,喂狗
IWDG_Enable(); //独立看门狗使能
while (1)
{
Key_GetNum(); //调用阻塞式的按键扫描函数,模拟主循环卡死
IWDG_ReloadCounter(); //重装计数器,喂狗
OLED_ShowString(4, 1, "FEED"); //OLED闪烁FEED字符串
Delay_ms(200); //喂狗间隔为200+600=800ms
OLED_ShowString(4, 1, " ");
Delay_ms(600);
}
}
4.窗口看门狗
窗口看门狗的代码与独立看门狗的代码相似,最大区别是窗口看门狗需要使能APB1的WWDG时钟
// 省略的代码与独立看门狗相同
RCC_APB1PeriphClockCmd(RCC_APB1Periph_WWDG, ENABLE); //开启WWDG的时钟
/*WWDG初始化*/
WWDG_SetPrescaler(WWDG_Prescaler_8); //设置预分频为8
WWDG_SetWindowValue(0x40 | 21); //设置窗口值,窗口时间为30ms
WWDG_Enable(0x40 | 54); //使能并第一次喂狗,超时时间为50ms
while (1)
{
Key_GetNum(); //调用阻塞式的按键扫描函数,模拟主循环卡死
OLED_ShowString(4, 1, "FEED"); //OLED闪烁FEED字符串
Delay_ms(20); //喂狗间隔为20+20=40ms
OLED_ShowString(4, 1, " ");
Delay_ms(20);
WWDG_SetCounter(0x40 | 54); //重装计数器,喂狗
}
五.闪存
1.内部flash
stm32f1系列的FLASH包含程序存储器、系统存储器和选项字节三个部分,通过闪存存储器接口(外设)可以对程序存储器和选项字节进行擦除和编程 读写FLASH的用途:
在线编程(ICP):用于更新程序存储器的全部内容,它通过JTAG、SWD协议或系统加载程序(Bootloader)下载程序 在程序中编程(IAP)可以使用微控制器支持的任一种通信接口下载程序
闪存模块组织:

FLASH基本结构:

FLASH解锁: FPEC共有三个键值:
解锁:
加锁:设置FLASH_CR中的LOCK位锁住FPEC和FLASH_CR
使用指针访问存储器:
#define __IO volatile
//volatile的作用是防止编译器优化
uint16_t Data = *((__IO uint16_t *)(0x08000000));
使用指针写指定地址下的存储器:
*((__IO uint16_t *)(0x08000000)) = 0x1234;
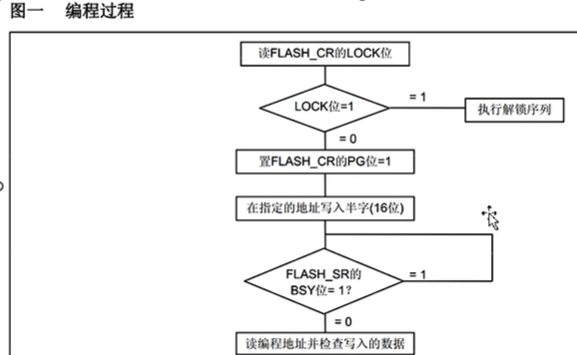
程序存储器编程:
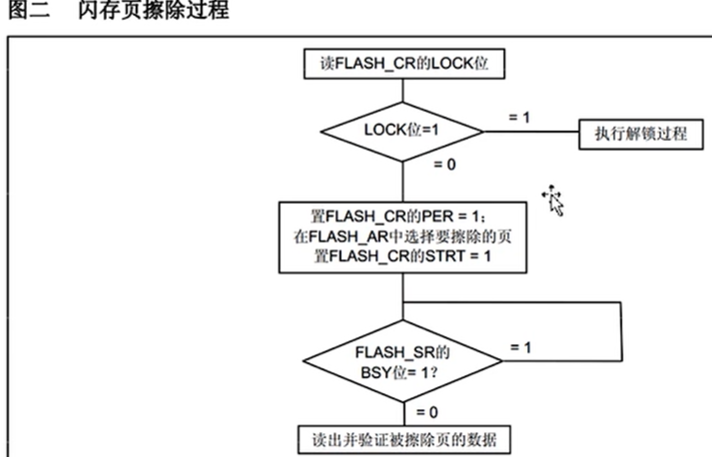
程序存储器页擦除:
程序存储器全擦除:


选项字节编程:
选项字节擦除:
器件电子签名:电子签名存放在闪存存储器模块的系统存储区域,包含的芯片识别信息在出厂时编写,不可更改,使用指针读指定地址下的存储器可获取电子签名 闪存容量存储器:基地址:0x1FFF F7E0,大小:16位 产品唯一身份标识寄存器:基地址:0x1FFF F7E8,大小:96位





评论前必须登录!
注册