 网硕互联帮助中心
网硕互联帮助中心 本文还有配套的精品资源,点击获取 
简介:本文深入介绍了RoboCup 2D服务器的功能和原理,它是模拟足球比赛的仿真环境核心。文章详细指导了如何搭建2D仿真平台,包括环境准备、获取源码、编译源码、配置服务器、启动服务器、编写机器人控制器和运行仿真等步骤。对遇到的问题提供了解决方案,并概述了平台搭建所需的技术知识。 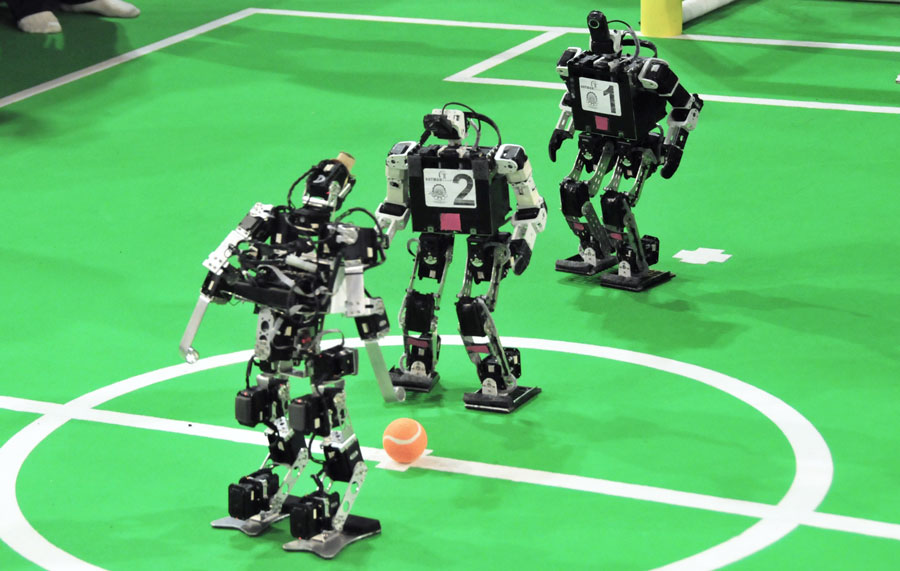
1. RoboCup 2D服务器核心概念
1.1 RoboCup 2D仿真环境简介
RoboCup 2D服务器提供了一个标准的足球比赛环境,通过2D图形界面模拟机器人足球比赛。它使得研究人员可以在没有实际物理机器人的条件下测试和评估算法。在这个环境中,团队由11个虚拟机器人组成,这些机器人由服务器中的软件代理控制。比赛遵循RoboCup联合会制定的规则,目的是促进人工智能和机器人技术的发展。
1.2 核心组件与功能
RoboCup 2D服务器的核心包括以下几个组件:
- 比赛引擎 :负责模拟物理环境,如球和机器人的运动。
- 视觉系统 :提供机器人视角的图像,用于机器人的决策制定。
- 监听器(Listener)和代理(Agent) :分别用于接收环境信息和发出控制指令。
- 裁判系统 :确保比赛的公正性,并处理比赛中的各种事件。
为了深入理解这些组件如何交互,可以将它们类比为现实世界中的足球比赛。比赛引擎就是场地和足球,视觉系统是球员的眼睛,监听器和代理是球员的大脑和肌肉,裁判系统则是场上的裁判。
1.3 开发与测试的优势
RoboCup 2D服务器为AI和机器学习的研究提供了诸多优势:
- 可重复性 :每次仿真都是在相同的条件下进行,确保测试的一致性。
- 安全性 :由于是虚拟环境,研究者可以在没有硬件损坏风险的情况下测试创新的算法。
- 经济性 :无需昂贵的物理机器人和场地设施。
- 实时性 :仿真环境中的比赛可以实时进行,便于快速迭代开发和策略测试。
下一章将详细探讨中间状态机(ISM)模型,它是RoboCup 2D环境中实现机器人行为控制的关键技术。
2. 中间状态机(ISM)模型
在现代软件开发中,中间状态机(Intermidiate State Machine,ISM)模型已经成为构建复杂系统特别是游戏和模拟器的关键组件之一。ISM通过定义明确的状态和状态间的转换规则,提供了一种清晰的结构来管理系统的动态行为。在RoboCup 2D仿真环境的上下文中,ISM模型为控制机器人行为提供了强大的抽象。
2.1 中间状态机的基本原理
2.1.1 状态机的定义和作用
状态机是一种计算模型,由一系列状态、状态之间的转换以及触发这些转换的事件组成。状态代表了系统在某一时刻的条件或情况。转换则是系统从一个状态移动到另一个状态的过程,通常由事件来触发。
在RoboCup 2D仿真环境中,一个状态可以是机器人的“定位”、“带球”、“射门”等行为。当机器人完成定位行为,它可能基于当前游戏的需要,通过一个事件(比如接到一个命令或者球到达一定位置)进入“带球”状态。
状态机对于确保系统行为的正确性和可预测性至关重要。它使得开发者能够以模块化和可维护的方式组织复杂的逻辑,因为它帮助开发者可视化和理解系统的行为。
2.1.2 中间状态机在RoboCup 2D中的应用
在RoboCup 2D环境中,ISM模型被用来处理机器人的行为决策。每台机器人可以被看作是一个小型的状态机,它根据比赛的不同阶段和环境的变化,在各种不同的状态间进行转换。
例如,当比赛开始时,每台机器人都会处于“初始定位”状态,它将观察比赛场地,然后根据观察结果转换到“寻找目标”状态。当机器人发现球并接收到进攻指令时,状态可能转换到“快速前插”状态。
ISM模型通过定义清晰的接口和逻辑,确保了整个团队的行为协调一致,使系统的控制更加精细和可控。而且,状态机的清晰性和模块化也使得对单个状态进行优化和维护更加容易。
// 伪代码示例:ISM模型的状态转换
enum State { IDLE, SEEKING, ATTACKING };
State currentState = IDLE;
void transitionTo(State newState) {
switch (currentState) {
case IDLE:
if (event == SEE进球) {
currentState = ATTACKING;
} else if (event == SEE敌方) {
currentState = SEEKING;
}
break;
case SEEKING:
if (event == FIND进球) {
currentState = ATTACKING;
} else if (event == TIME_OUT) {
currentState = IDLE;
}
break;
case ATTACKING:
if (event == SCORE) {
currentState = IDLE;
}
break;
}
}
在上述伪代码中,定义了一个状态枚举,并通过 transitionTo 函数来处理状态之间的转换逻辑。事件(如 SEE进球 、 SEE敌方 、 FIND进球 等)触发状态转换。
2.2 状态转换和事件触发机制
2.2.1 状态转换的条件和过程
状态转换的条件是由内部或外部事件决定的。在ISM模型中,状态转换需要明确的条件判断逻辑,这些逻辑通常定义在状态转换函数中。
事件可以是外部发生的,如用户输入或者传感器信息,也可以是内部生成的,如定时器溢出或条件满足。这些事件会触发状态机进行检查,以确定是否满足转换到新状态的条件。
状态转换的过程通常包含以下几个步骤:
2.2.2 事件驱动和消息传递机制
ISM模型通常依赖于事件驱动的方式来响应外部或内部的刺激。事件可以携带数据信息,用于提供足够的上下文来决定状态转换。
事件驱动系统通过消息传递机制进行交互。当一个事件发生时,会生成一个消息,并根据状态机的定义发送给一个或多个接收者。接收者根据收到的消息内容执行相应的动作。
// 消息传递和事件驱动伪代码示例
struct Message {
enum EventType { SEE进球, SEE敌方, SCORE };
EventType eventType;
// 其他相关信息
};
void onEvent(Message event) {
switch (event.eventType) {
case SEE进球:
// 执行进球相关的动作
break;
case SEE敌方:
// 执行防守相关的动作
break;
case SCORE:
// 更新得分状态
break;
}
}
在这个示例中, Message 结构体代表了一个事件,包含了事件类型和相关数据。 onEvent 函数处理事件并根据事件类型执行不同的动作。
2.3 状态机的优化和调试
2.3.1 状态机的性能优化策略
状态机的性能优化策略通常包括减少不必要的状态转换、简化事件处理逻辑和提升状态机的响应效率。
减少不必要的状态转换可以通过合并状态和移除冗余的转换逻辑来实现。简化事件处理逻辑可以通过使用更高效的数据结构和算法来完成。提升响应效率可以通过优化消息传递机制和减少锁的使用来达到。
// 优化状态转换的伪代码示例
void optimizeStateTransition() {
// 合并可合并的状态
// 移除冗余的转换逻辑
// 使用更高效的数据结构和算法处理事件
}
在上述伪代码中, optimizeStateTransition 函数展示了如何对状态转换进行优化。
2.3.2 状态机的调试技巧和工具
状态机的调试可以使用传统调试方法和一些特定的工具。传统的调试方法包括设置断点、单步执行和查看变量值。此外,还可以使用日志记录、状态可视化工具和代码覆盖率分析工具。
状态可视化工具可以提供直观的方式来观察状态转换和事件流动,这对于理解复杂的状态机尤其有用。代码覆盖率分析工具可以指出哪些状态和转换逻辑被执行到了,哪些未被执行到,帮助开发者确保测试的充分性。
graph TD
A[开始调试] –> B[设置断点和日志]
B –> C[执行状态机]
C –> D[使用状态可视化工具]
D –> E[分析代码覆盖率]
E –> F[优化和重构]
在上述mermaid格式的流程图中,展示了状态机调试的步骤。
通过这些策略和工具,开发者可以有效地对状态机进行优化和调试,确保系统运行的效率和稳定性。在RoboCup 2D环境中,状态机的优化和调试对于提高机器人的反应速度和比赛策略的灵活性至关重要。
3. 2D仿真平台搭建步骤
3.1 环境准备与硬件要求
在深入探讨如何搭建2D仿真平台之前,首先需要做好环境和硬件方面的准备。这些准备工作是后续操作顺利进行的基础,确保仿真环境能够稳定运行,为后续的测试和开发提供可靠的支持。
3.1.1 选择合适的计算机硬件配置
在选择计算机硬件配置时,需要考虑以下几个关键因素:
- CPU性能 :选择多核CPU能够提供足够的并行处理能力,以便高效地执行仿真计算。
- 内存容量 :足够的RAM(建议至少8GB)可以保证在多线程运行时,系统不会因为内存不足而频繁进行硬盘交换。
- 硬盘存储 :考虑到仿真过程中会产生大量数据,建议使用SSD硬盘以提高数据读写速度。
3.1.2 安装必备的外围设备和传感器
外围设备和传感器的安装也是搭建2D仿真平台的重要一环。以下是一些必备设备:
- 网络适配器 :确保计算机具备稳定且高速的网络连接能力,以便在仿真中与其他设备或服务器通讯。
- 摄像头 :虽然在2D仿真中使用不多,但某些情况下可能需要摄像头进行视觉数据的采集。
3.2 Linux操作系统要求
2D仿真平台通常在Linux操作系统上运行,因此选择合适的Linux发行版并安装必要的工具和依赖库是非常关键的一步。
3.2.1 Linux发行版的选择和安装
对于RoboCup 2D仿真环境,推荐使用较新的稳定版Linux发行版,例如Ubuntu或Fedora。这些发行版拥有丰富的软件库和良好的社区支持。
# 以Ubuntu为例,安装步骤可能如下:
sudo apt update
sudo apt upgrade -y
sudo apt install ubuntu-desktop -y
3.2.2 必要的系统工具和依赖库安装
安装完Linux操作系统后,需要安装一系列的软件工具和依赖库,以便构建和运行2D仿真环境:
# 示例:安装编译工具、图形库和依赖包
sudo apt install build-essential -y
sudo apt install libx11-dev -y
sudo apt install cmake -y
3.3 搭建步骤详解
搭建2D仿真平台需要遵循一系列详细的步骤,以确保每个环节都正确无误。
3.3.1 按顺序执行搭建任务
搭建过程需要按照指定的步骤顺序进行:
3.3.2 检查并确保所有组件正常工作
在完成搭建后,需要验证每个组件是否能够正常工作。这通常包括检查:
- 操作系统和软件包是否最新 :执行更新命令并检查软件包是否最新。
- 依赖库是否安装正确 :利用相关命令检查所有必需的依赖库是否已经正确安装。
- 仿真环境是否稳定 :运行基本的仿真任务,确保仿真环境能够正常启动和运行。
# 示例:检查已安装的库文件
dpkg -l | grep libx11
通过以上搭建步骤,一个基础的2D仿真平台就初步搭建完成了。在后续的章节中,我们将继续探讨如何获取和编译RoboCup 2D服务器源码,并最终进入仿真运行与策略测试优化的阶段。
4. 获取和编译RoboCup 2D服务器源码
4.1 获取RoboCup 2D服务器源码
4.1.1 访问官方源码仓库
访问RoboCup官方网站或其GitHub页面是获取源码的第一步。确保你处于一个稳定且快速的网络环境中,这样可以加快下载速度并减少中断的可能性。官方源码仓库通常托管在如GitHub这样的平台上,因此你的系统中必须安装有Git客户端。如果你使用的是Linux系统,可以使用内置的包管理器安装Git,例如在Ubuntu上,你可以通过以下命令安装Git:
sudo apt update
sudo apt install git
对于Windows用户,GitHub官方提供了Git Bash工具,可以用来在Windows环境下执行Git命令。
一旦安装了Git,通过以下命令克隆仓库:
git clone [repository-url]
将 [repository-url] 替换为实际的RoboCup 2D服务器源码仓库URL。
4.1.2 下载源码到本地计算机
使用Git克隆命令后,源码会下载到你指定的本地目录。通常情况下,你可以接受默认的下载目录,或者使用 -b 参数指定分支(例如稳定版或开发版),并使用 -o 参数指定本地仓库的目录名称。以下是一个示例:
git clone -b master -o robocup2d [repository-url] robocup2d-server
这里, -b master 指定了要克隆的分支, -o robocup2d 将本地仓库目录命名为 robocup2d ,而最后一个参数指定了要下载的项目目录名称 robocup2d-server 。
4.2 编译源码前的准备工作
4.2.1 环境变量和依赖包的配置
RoboCup 2D服务器可能依赖于特定的库和工具来编译和运行。在编译之前,你需要配置好环境变量,确保编译器和构建工具能找到所有必要的依赖。在Linux系统中,通常需要配置的环境变量包括 PATH 和 LD_LIBRARY_PATH 。
例如,如果编译过程中需要 gcc 编译器和 make 构建工具,你可以使用以下命令安装它们:
sudo apt install build-essential
对于其他依赖的库,你可能需要使用包管理器来安装,例如 libssl-dev 或 libcurl4-openssl-dev ,具体取决于服务器源码的依赖需求。
4.2.2 选择合适的编译器和构建工具
RoboCup 2D服务器可能支持多种编译器,但通常使用的是GCC或者Clang。对于构建工具, make 是最常用的选择,但有时也可能使用 cmake 或其他构建系统。使用命令行工具查看可用的编译器版本:
gcc –version
clang –version
确认你的系统中已安装了适当的编译器版本。安装或配置构建工具的过程会根据你选择的工具而变化。例如,使用 apt 安装 make :
sudo apt install make
4.3 源码编译与构建过程
4.3.1 编译过程中的常见问题及解决
编译过程中可能会遇到各种问题,例如缺少库、版本不兼容或者构建脚本错误。一旦出现错误,编译过程将停止,你需要阅读错误信息来确定问题所在。
例如,如果缺少某个依赖库,你将看到类似于以下的错误信息:
error: ‘SSL_library_init’ was not declared in this scope
这时,你需要安装相应的开发包(通常是 -dev 版本的库),例如:
sudo apt install libssl-dev
修复所有问题后,可以重新尝试编译。有时需要清理之前的编译结果,可以使用如下命令:
make clean
然后再尝试编译:
make
4.3.2 构建服务器运行环境
编译成功之后,你需要构建服务器运行环境。这可能包括初始化数据库、设置配置文件或者调整网络设置。确保按照文档说明进行操作,文档通常位于服务器源码目录中的 doc 文件夹。
你可能需要修改配置文件来设置服务器运行参数,如监听的端口、日志级别等。以下是一个修改配置文件的示例命令:
sed -i "s/PORT=8080/PORT=9000/g" config.txt
这里使用 sed 命令将配置文件 config.txt 中的默认端口从 8080 改为 9000 。
确保所有的配置都是正确的之后,就可以启动服务器运行环境了,可能会使用如下命令:
./bin/robocup2d-server
这里假设服务器的可执行文件名为 robocup2d-server ,位于 bin 目录下。根据实际情况,你可能需要使用 sudo 来获取必要的权限或调整路径来找到正确的可执行文件。
4.4 扩展内容:代码块和依赖管理
在软件工程中,处理源码和依赖通常会使用到包管理工具和构建系统。RoboCup 2D服务器的构建和依赖管理可能使用到了如 Makefile 、 CMakeLists.txt 或者 package.json 等文件。这些文件定义了编译指令、项目依赖和构建流程,是软件开发的核心组成部分。
Makefile 示例分析
下面是一个 Makefile 的简单示例,它定义了如何编译和链接一个程序:
# 定义编译器和编译选项
CC=gcc
CFLAGS=-g -Wall
# 目标文件列表
OBJ=main.o utils.o
# 最终目标文件名
TARGET=robocup2d-server
# 默认目标:编译和链接
all: $(TARGET)
# 编译目标文件
%.o: %.c
$(CC) -c $(CFLAGS) $< -o $@
# 链接最终目标文件
$(TARGET): $(OBJ)
$(CC) $(CFLAGS) -o $@ $^
# 清理编译结果
clean:
rm -f $(OBJ) $(TARGET)
# 依赖规则
main.o: main.c utils.h
utils.o: utils.c utils.h
在 Makefile 中, % 符号用于定义模式规则, $< 代表依赖项, $@ 代表目标文件, $^ 代表所有的依赖项。
CMakeLists.txt 示例分析
在 CMake 系统中, CMakeLists.txt 文件定义了项目的构建规则。下面是一个简单的示例:
cmake_minimum_required(VERSION 3.10)
project(RoboCup2DServer LANGUAGES CXX)
# 设置C++标准
set(CMAKE_CXX_STANDARD 11)
set(CMAKE_CXX_STANDARD_REQUIRED ON)
# 添加源文件
add_executable(robocup2d-server main.cpp utils.cpp)
# 查找依赖库并链接
find_package(Threads REQUIRED)
target_link_libraries(robocup2d-server Threads::Threads)
在这个 CMakeLists.txt 文件中, project() 函数声明了项目名称和使用的语言, add_executable() 添加了编译目标,而 find_package() 和 target_link_libraries() 则用于查找和链接必需的库。
这一章节深入介绍了获取RoboCup 2D服务器源码的方法,并详细解析了编译前的准备工作以及构建过程中的关键步骤。通过本章节的学习,你可以确保源码的正确获取和编译,为下一步搭建仿真平台打下坚实的基础。
5. 仿真运行与策略测试优化
5.1 机器人控制器编写与编程语言选择
在RoboCup 2D仿真比赛中,编写高效的机器人控制器是团队获得成功的关键。选择合适的编程语言,能够帮助开发者以更高的效率实现复杂策略,增强团队的竞争能力。
5.1.1 常用编程语言的对比分析
目前RoboCup 2D仿真主要支持C++和Java等编程语言。C++以性能强大著称,适合进行算法级别的优化;而Java则提供了良好的跨平台支持和丰富的库资源。针对不同的应用场景,开发者需要进行权衡选择:
- C++ :
- 性能:编译型语言,运行速度快。
- 社区:有庞大的开发者社区和丰富的资源。
-
复杂性:相对复杂的语法和内存管理机制。
-
Java :
- 跨平台:一次编写,到处运行。
- 库资源:有完善的库资源,方便开发。
- 性能:虽然运行在JVM上,可能略逊于C++。
5.1.2 编写符合RoboCup规则的控制器
编写机器人控制器时,必须严格遵守RoboCup比赛规则。控制器代码通常包括感知、决策和动作三个核心部分。下面是一个简单的C++伪代码示例,展示了这三个部分的实现:
class RobotController {
public:
void sense() {
// 获取传感器数据,比如球的位置、队友和敌人的位置等
}
void decide() {
// 基于感知数据进行决策,设计球队的战术和动作
}
void act() {
// 根据决策结果,生成并执行动作,比如传球、射门等
}
void loop() {
sense();
decide();
act();
}
};
5.2 仿真运行和团队协作
仿真环境的搭建和运行是一个涉及多个角色的协作过程。对于团队中的每个成员来说,理解各自的角色和责任至关重要。
5.2.1 设置仿真环境和测试场景
仿真环境的设置通常包括定义球场大小、机器人和球的参数等。测试场景的设置则决定了测试的具体内容,比如是测试整体的团队协作还是单个机器人的特定功能。
5.2.2 团队内部协作和分工
团队协作是开发高效控制器的关键。每个成员应根据自身的专长进行分工。比如,一些成员可能更擅长编写决策算法,而另一些可能专注于代码优化或视觉识别系统。
5.3 策略测试与性能优化
测试和优化策略是比赛中持续改进的过程。有效的测试可以帮助识别控制器的不足之处,并针对性地进行优化。
5.3.1 分析测试结果并优化策略
测试结果分析可能包括命中率、防守效率、协同作业等多个方面。通过收集和分析数据,团队可以找到弱点并调整策略。
5.3.2 应用机器学习方法进行算法优化
机器学习是提升策略性能的一种有效手段。利用机器学习方法,可以自动发现和优化决策过程中的各种参数。
5.4 常见问题解决与社区资源利用
在仿真测试中经常会遇到各种问题。有效地利用社区资源是解决问题的关键。
5.4.1 应对仿真过程中出现的常见问题
常见的问题可能包括仿真软件的崩溃、机器人行为异常等。团队应该建立一套问题排查流程,并对常见问题有所准备。
5.4.2 利用开源社区资源解决问题和学习
开源社区如RoboCup官网、GitHub等平台提供了大量的资源和案例,团队可以通过学习社区上的优秀代码和经验来提升自己的实力。
通过这一系列的步骤,团队不仅能够在仿真测试中找到策略的弱点并进行针对性的优化,而且能通过社区合作和资源共享,提升整体的竞争水平。
本文还有配套的精品资源,点击获取
简介:本文深入介绍了RoboCup 2D服务器的功能和原理,它是模拟足球比赛的仿真环境核心。文章详细指导了如何搭建2D仿真平台,包括环境准备、获取源码、编译源码、配置服务器、启动服务器、编写机器人控制器和运行仿真等步骤。对遇到的问题提供了解决方案,并概述了平台搭建所需的技术知识。
本文还有配套的精品资源,点击获取






评论前必须登录!
注册