 网硕互联帮助中心
网硕互联帮助中心
【ROS 基础教学系列】ROS参数服务器(Param)
文章浏览阅读1.2k次,点赞12次,收藏29次。参数服务器在ROS中主要用于实现不同节点之间的数据共享。参数服务器相当于是独立于所有节点的一个公共容器,可以将数...
文章浏览阅读1.2k次,点赞12次,收藏29次。参数服务器在ROS中主要用于实现不同节点之间的数据共享。参数服务器相当于是独立于所有节点的一个公共容器,可以将数...

文章浏览阅读1.9k次,点赞29次,收藏19次。napcat+nonebot-bison搭建消息推送机器人_napcat机器人
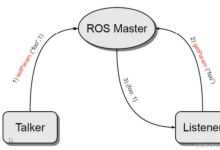
文章浏览阅读806次,点赞8次,收藏9次。参数服务器在ROS中主要用于实现不同节点之间的数据共享(P2P)。参数服务器相当于是独立于所有节点的一个公共容器,可以...
文章浏览阅读1.3k次,点赞33次,收藏5次。考虑到不同线束接口的工艺差异,我们设计了灵活的报警功能,允许在每个监测方向上设置两级报警阈值,以提高报警功能的适应...

文章浏览阅读1.9k次,点赞14次,收藏5次。模块端口的校验码、数据位、停止位及波特率的设置需要和串口设备(如:新大陆NLS-NVF230扫码枪)的设置保持一致...
文章浏览阅读1.1k次,点赞18次,收藏10次。还有一点我不得不强调——现在创建自己的 MCP 服务器真的非常简单,如果现有的 MCP 服务器不能满足你的需求,...

文章浏览阅读8.6k次,点赞26次,收藏51次。本文介绍了PDPS16Tecnomatix_16.0单机版的安装过程,包括确认安装包内容、安装步骤、许可证服务器...
